ハードウェアの接続
まず、両方のカメラを SVC Pro モジュールに接続します。ストロボ制御を使用する予定がある場合は、右側の explore3D カメラが 黒インク で印が付けられたコネクタに接続されていることを確認してください。 すべてを接続したら、システムの IP アドレスを使って WebUI を読み込み、両方のカメラが認識されていることを確認します。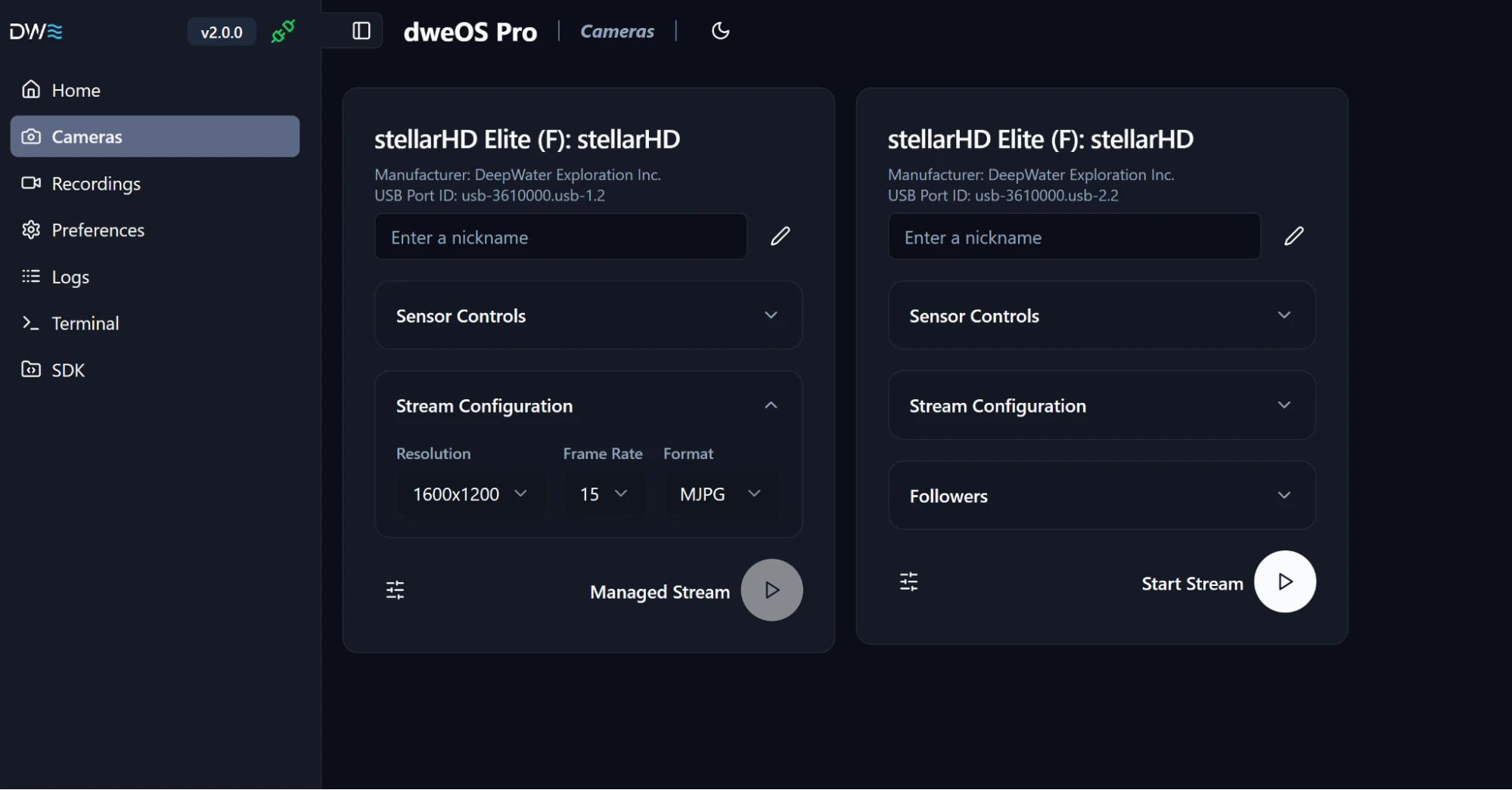
ストリーミング構成を選ぶ
DeepWater Desktop(DWD)のユーザーは、dweOS からストリームを開始する必要はありません。dweOS のストリーミングは、Discovery や独自のカスタムソフトウェア統合専用に設計されています。画質の最大化
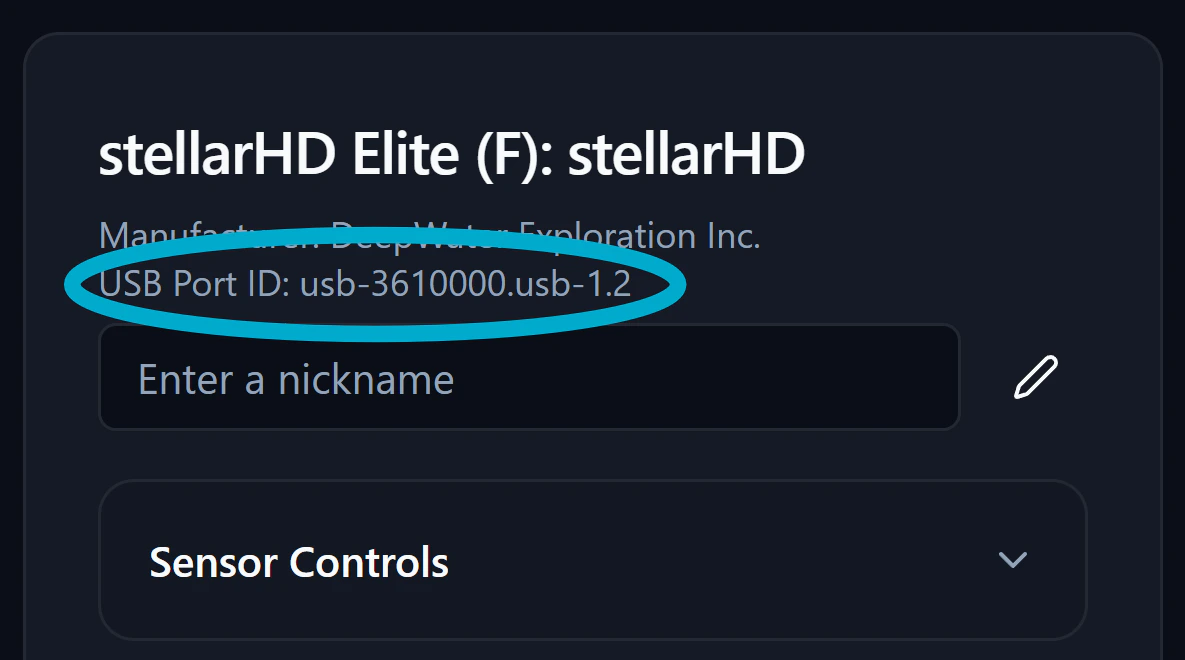
SVC Pro モジュールには 4 つのコネクタがあり、それぞれ 2 つの USB バス(各バスが 2 ポートを駆動)から電力供給されています。dweOS Pro では、各カメラに対する USB ポート ID が表示され、どのバスとポートを使用しているかを正確に確認できます。 USB ポート ID は、バス番号、続いてポート番号の形式で表示されます。- 最適なセットアップ例(別々のバス):
- カメラ 1:
usb-3610000.usb-1.2(バス 1、ポート 2) - カメラ 2:
usb-3610000.usb-2.2(バス 2、ポート 2)
- カメラ 1:
- 準最適なセットアップ例(同じバス):
- カメラ 1:
usb-3610000.usb-1.2(バス 1、ポート 2) - カメラ 2:
usb-3610000.usb-1.1(バス 1、ポート 1)
- カメラ 1:
整理 & 一般設定
カメラを最適なポートに接続したら、整理のためにニックネームを割り当てることができます。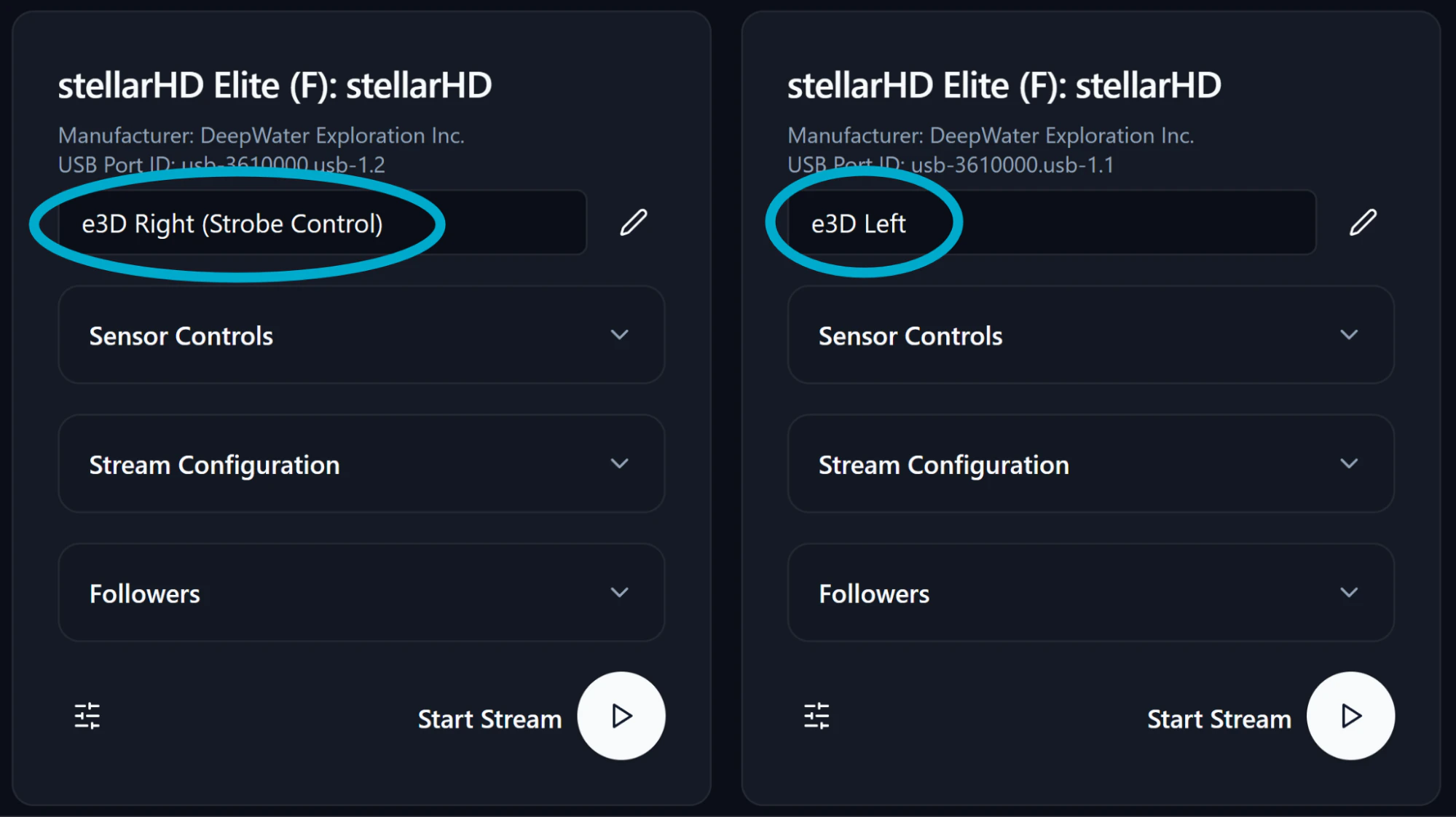
フレームレート(FPS)
15 FPS でのストリーミングを推奨します。これは、ファイルサイズを管理しやすく保ち、帯域を安定させつつ、スムーズな操縦体験を提供できる絶妙なバランスです。DeepWater Desktop のユーザーは、dweOS ではなく DWD 内で直接 15 FPS に設定してください。
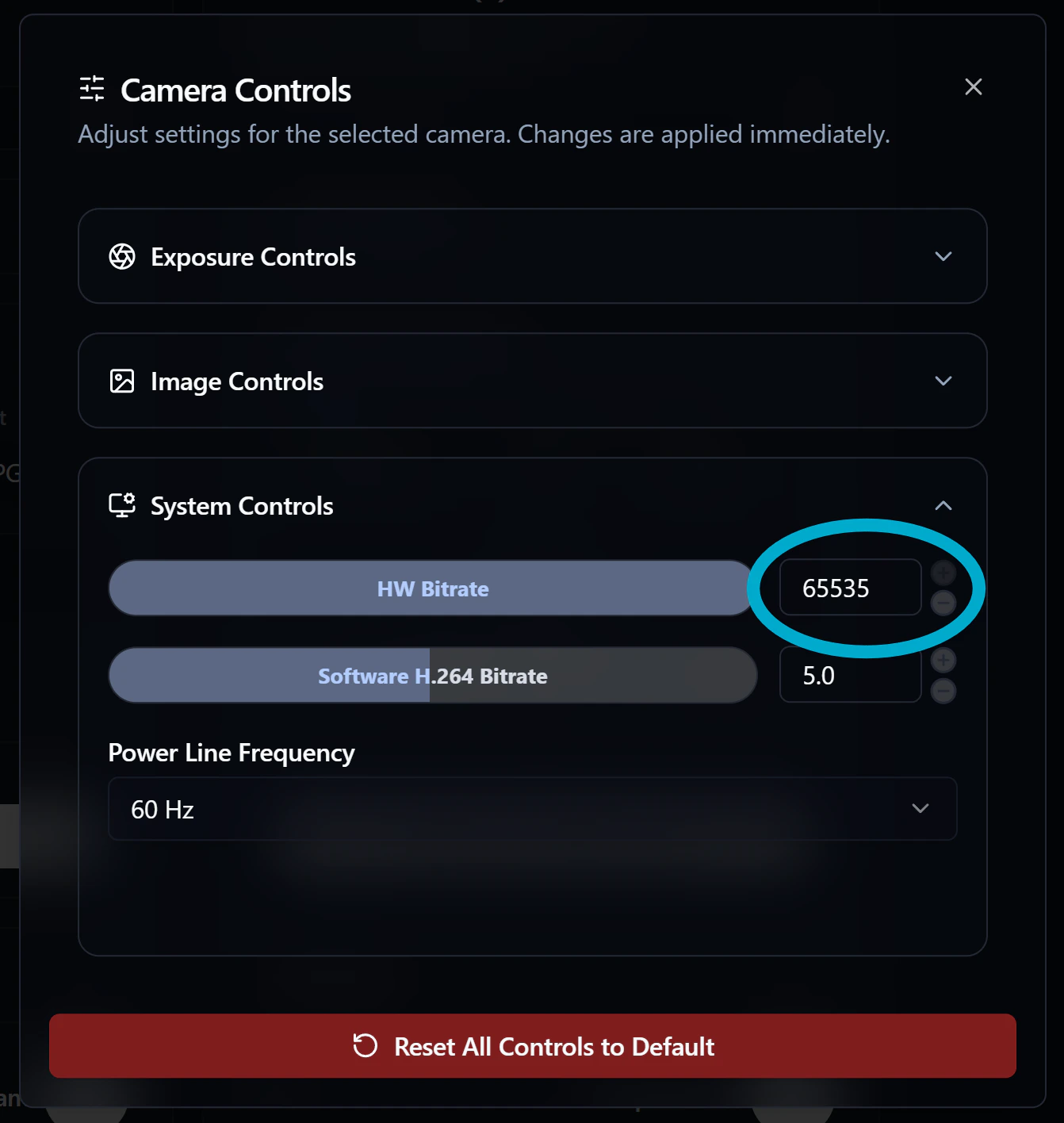
ビットレート
dweOS で最高の JPEG 画質を得るには、Camera Controls に移動し、System Controls を探します。HW Bitrate オプションを見つけ、最も高い値に設定します。この設定は次回の再起動用に自動的に保存されます。この手順を両方のカメラで繰り返してください。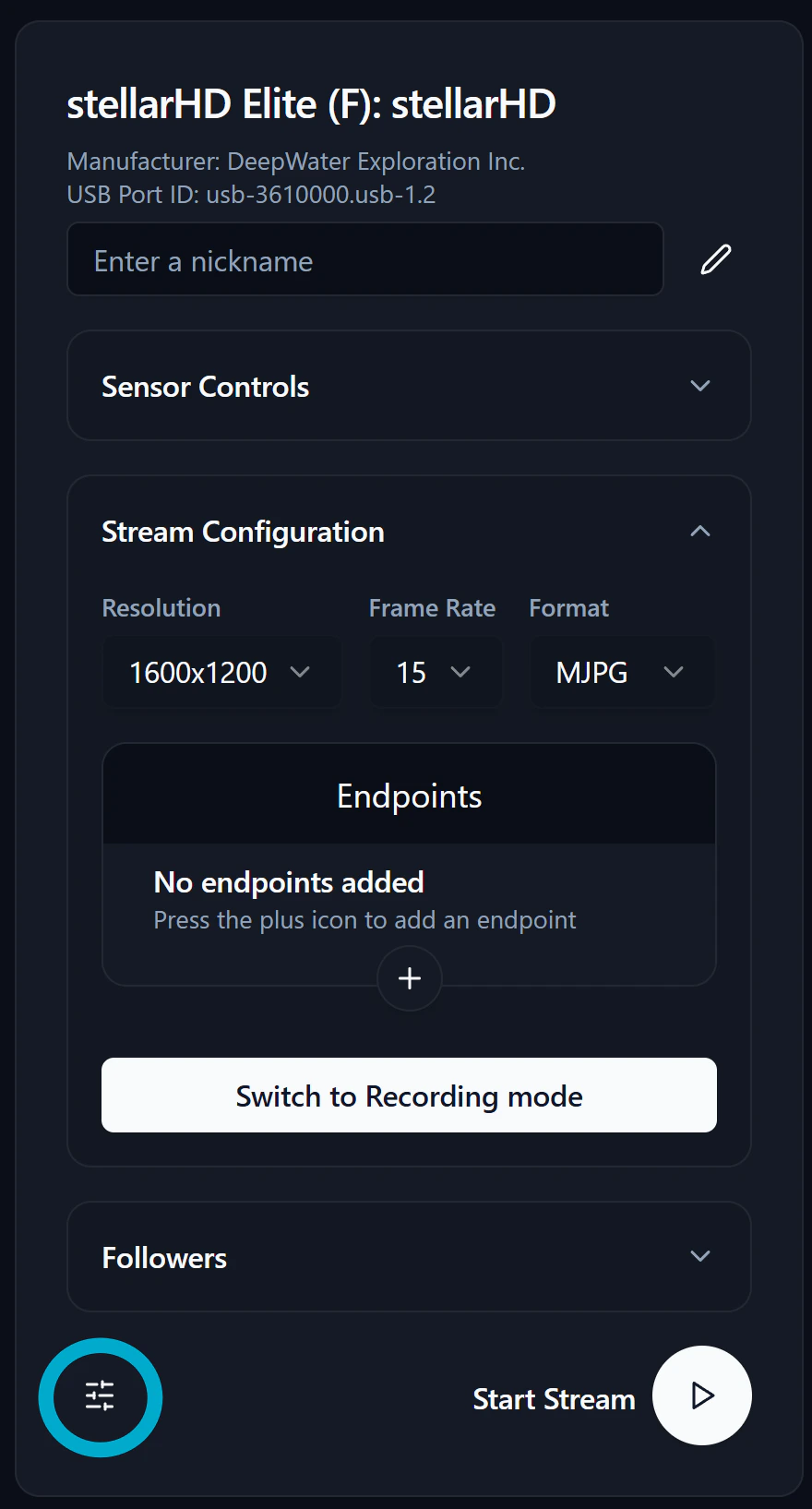
露出 & ストロボ制御
自動露出は、ほとんどの標準的な用途でうまく機能します。ただし、ストロボライトを使用している場合や、完全な手動制御が必要な場合は、dweOS の Sensor Controls で自動露出トグルを無効にできます。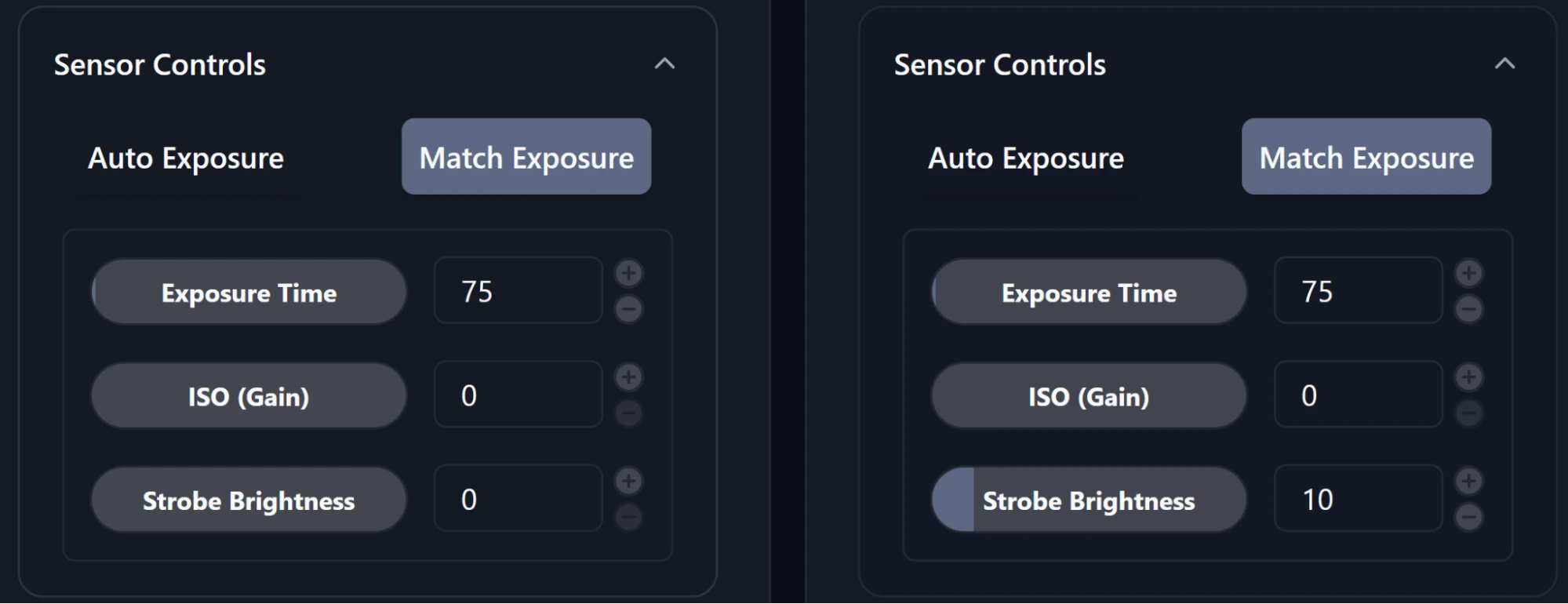
手動制御のためのプロのヒント
- Match Exposure: 両方のカメラでこれをオンにすると操作が簡単になり、ライティングを一貫させやすくなります。
- ストロボの明るさ: explore3D の右側のカメラは stellarHD Elite で、これがストロボを制御します。右側カメラのセンサーコントロールを使って、露出時間に対するストロボの明るさのバランスを取ります。
- 3D 再構築: 最もクリーンでシャープな 3D モデルを得るには、ISO をできるだけ低く保ってノイズを減らし、露出時間を短く保ってモーションブラーを防ぎます。深い水中でこれを達成するために、ストロボライトの使用を強く推奨します。
- 暗い環境: 真っ暗な水中では、露出時間は本質的にストロボに依存します。露出時間を固定された低い値にロックし、ストロボの明るさを調整するだけで必要なライティングを得られます。

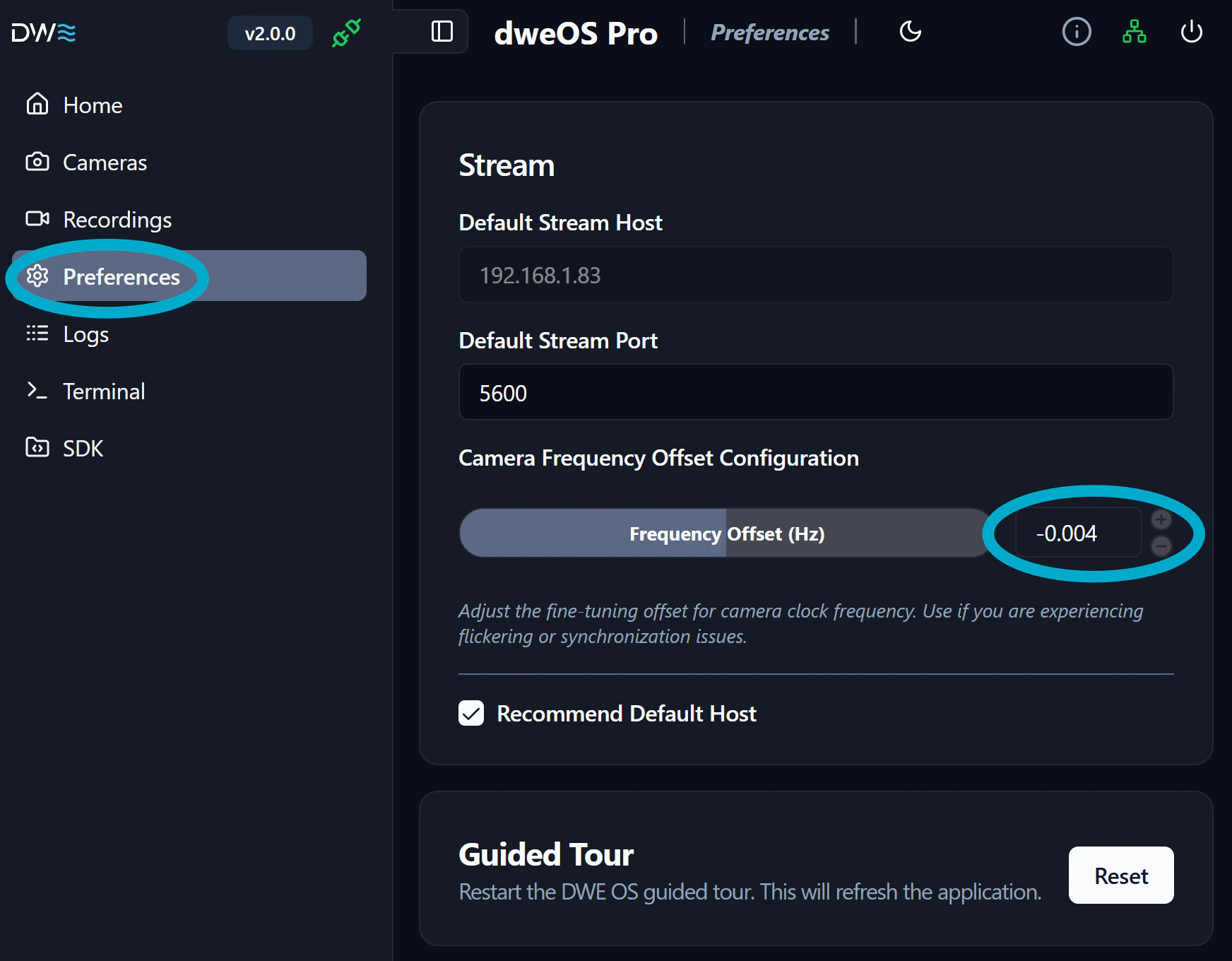
トラブルシューティング
おかしなフレーム、明るい環境での露出オーバー、または反応の鈍い自動露出に気付いていますか? これは通常、誤った周波数オフセットによって引き起こされます。 これを修正するには、dweOS の Preferences に移動し、画像が安定するまで周波数オフセットを微調整します。-0.004 のような小さな変化量から始め、問題が解決するまで数値を調整してください。