概要
DeepWater Desktop は SVC Pro のコンパニオンソフトウェアです。 SVC Pro および接続されたハードウェアからデータを受信し、補正画像、視差マップ、ポイントクラウドなどの 3D ビジュアルを生成します。DeepWater Desktop を使い始める
1
DeepWater Desktop を開く
ダウンロードした 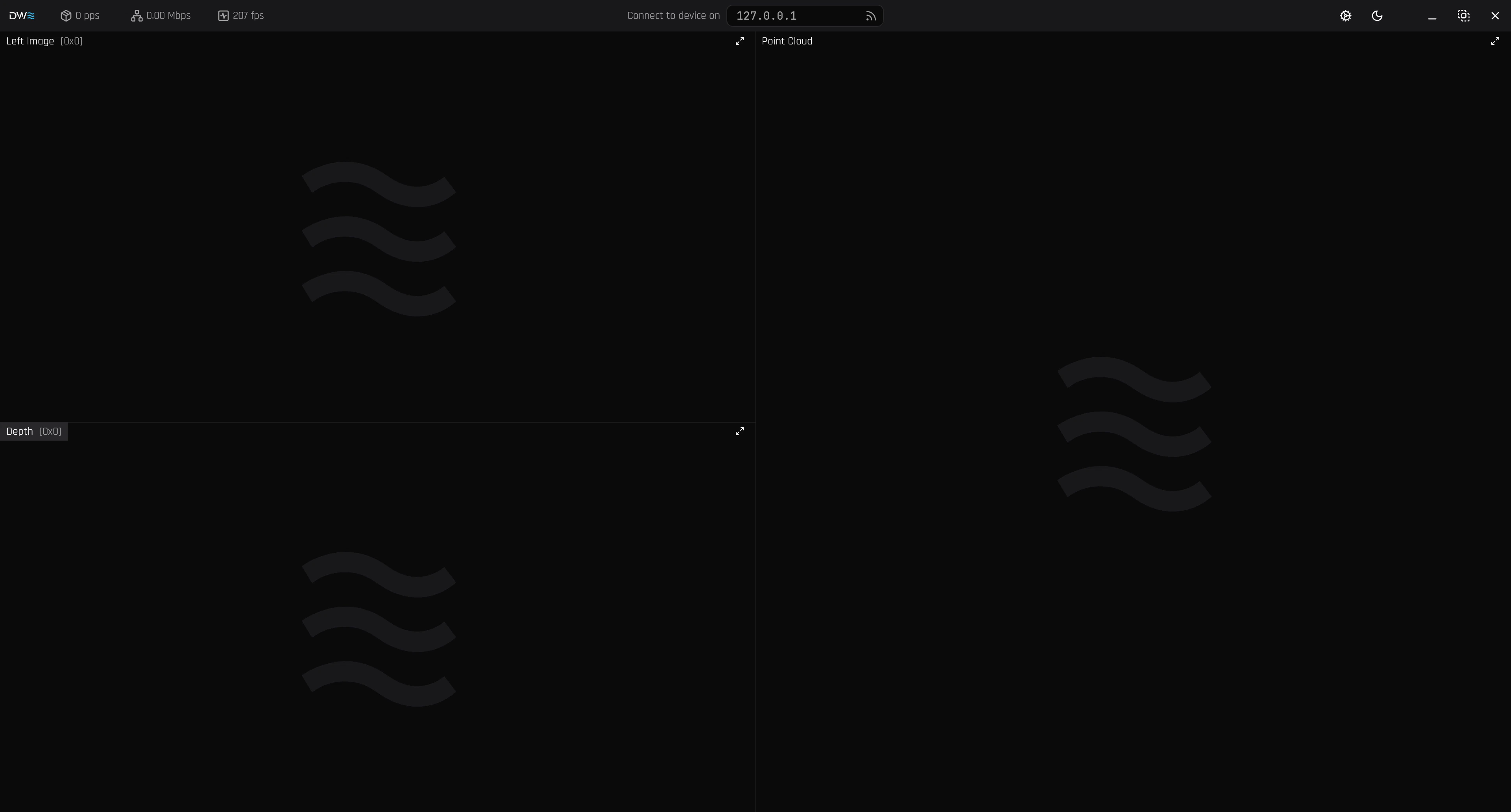
dwd-{version}-{platform}-x86 アーカイブを解凍して開きます。お持ちでない場合は、support@dwe.ai までサポートチームにお問い合わせください。
run スクリプトを実行してプログラムを起動します。- Linux
- Windows
2
SVC Pro に接続する

192.168.2.2 がデフォルトの IP アドレスです。
変更している場合は、SVC Pro の正しいアドレスを入力してください。
SVC Pro - スタートガイド を参照してください。3
ストリームを追加する
サーバアドレスの横にあるプラスアイコンを選択してストリームを追加します。
4
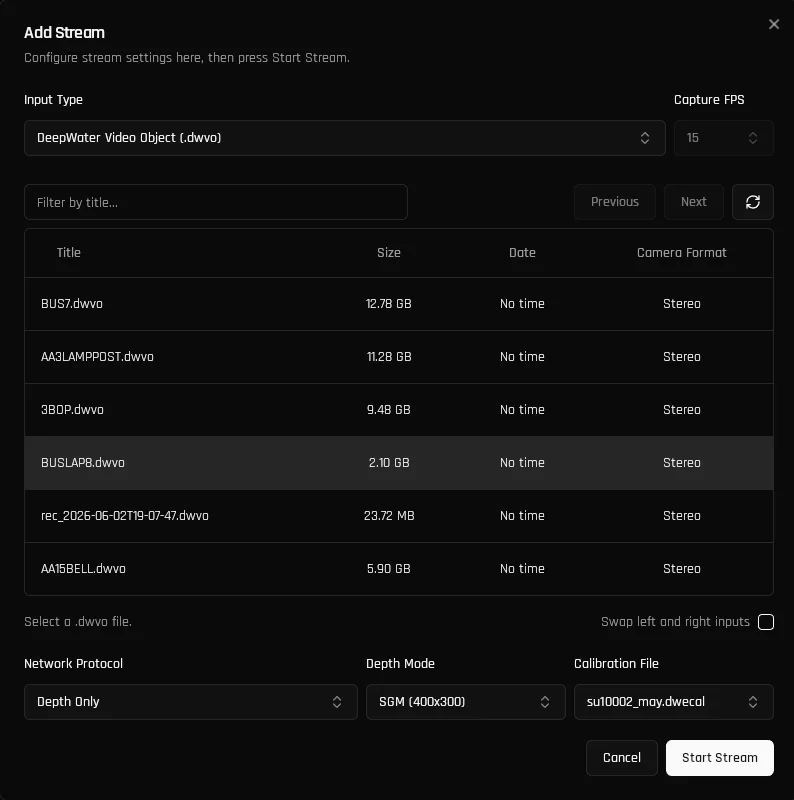
ストリームを設定する
ストリームを追加すると、画面にストリーム設定が表示されます。要件に応じてストリームを異なる方法で設定したい場合があります。一般的には、以下の表を参照できます。
次にキャリブレーションファイルを選択できます。デフォルトでは正しいキャリブレーションが選択されています。カスタムキャリブレーションファイルがある場合はここに表示されます。
- USB
- DWVO
左カメラ (通常は Leader-Follower モードでは Leader) を最初に選択し、次に右カメラを選択してください。
モジュール性のため、カメラは位置データを保持しないため、左右を手動で設定する必要があります。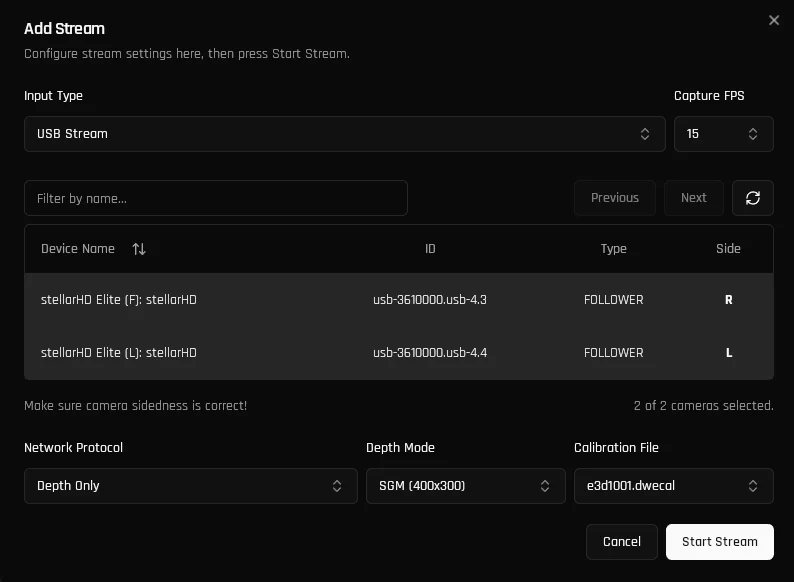
5
完了!
これで準備完了です! ストリームが開始されると、DeepWater Desktop はデータの処理を開始します。下記の例のように、補正画像、視差マップ、ポイントクラウドを含む 3D ビジュアルがメインインターフェイスでアクティブにストリーミングされているのが見えるはずです。