Hold deg til standardparameterne for best mulig opplevelse rett ut av boksen. Manuell
finjustering er helt valgfritt og forbeholdt avansert ytelsesoptimalisering.
Sporingsparametere
VSLAM-sporingsytelsen kan optimaliseres for ditt miljø ved å justere følgende parametere.Filterparametere
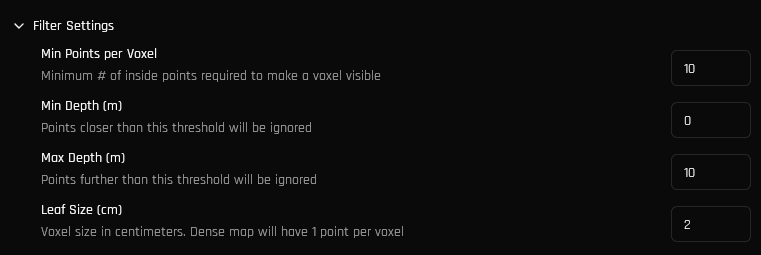
Et voxel-filter brukes for å sikre jevn punktfordeling i den resulterende punktskyen. Følgende filterinnstillinger kan konfigureres.