Oversikt
DeepWater Desktop kan automatisk lage en tett rekonstruksjon av omgivelsene dine, nyttig for live dekningskartlegging og målinger.Krav
- SVC Pro-modul – som kjører dweOS Pro
- Toppside-datamaskin/bærbar PC – som kjører DeepWater Desktop
Oppstartsparametere
1
Endre nettverksprotokoll
Åpne dialogen «Add Stream», velg kameraene dine og bytt Network Protocol til Coverage Mapping. Se hurtigstartveiledningen vår for informasjon om hvordan du gjør dette.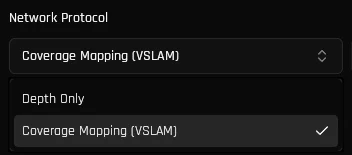
2
Juster sporings- og filterparametere (valgfritt)
Hold deg til standardparameterne for best mulig opplevelse rett ut av boksen. Manuell
finjustering er helt valgfritt og forbeholdt avansert ytelsesoptimalisering.
Sporings- og filterparametere
Referanse for finjustering av VSLAM-sporings- og voxel-filterparametere.
3
Start strømmen
Trykk på knappen «Start Stream». Når strømmen starter, vil DeepWater Desktop begynne å behandle dataene dine.
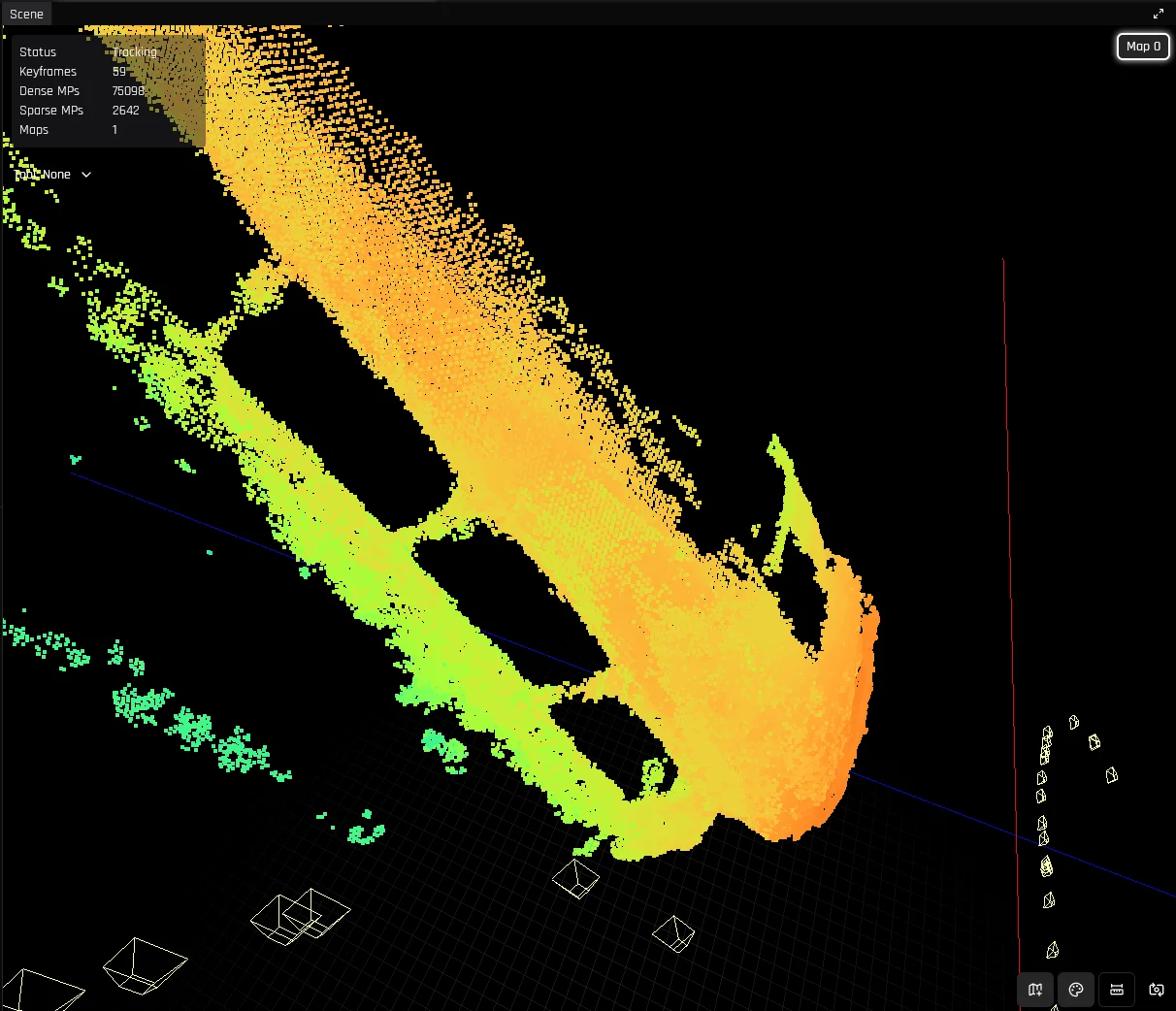
Du skal nå se en 3D-punktsky bli generert mens kameraet beveger seg rundt.Hvis du planlegger etterbehandling av dataene, start et opptak her også.
Sløyfelukkinger (loop closures)
Alle SLAM-systemer akkumulerer feil over tid. For å korrigere for dette bruker vi konseptet sløyfelukkinger – å observere samme sted fra samme pose på ulike tidspunkter. DeepWater Desktop gjenkjenner automatisk sløyfelukkinger og justerer tidligere målte poser og punktskyer deretter. For å initiere en sløyfelukking, reis ganske enkelt tilbake til en tidligere pose og vend i samme retning. En melding vil dukke opp i nederste høyre hjørne:
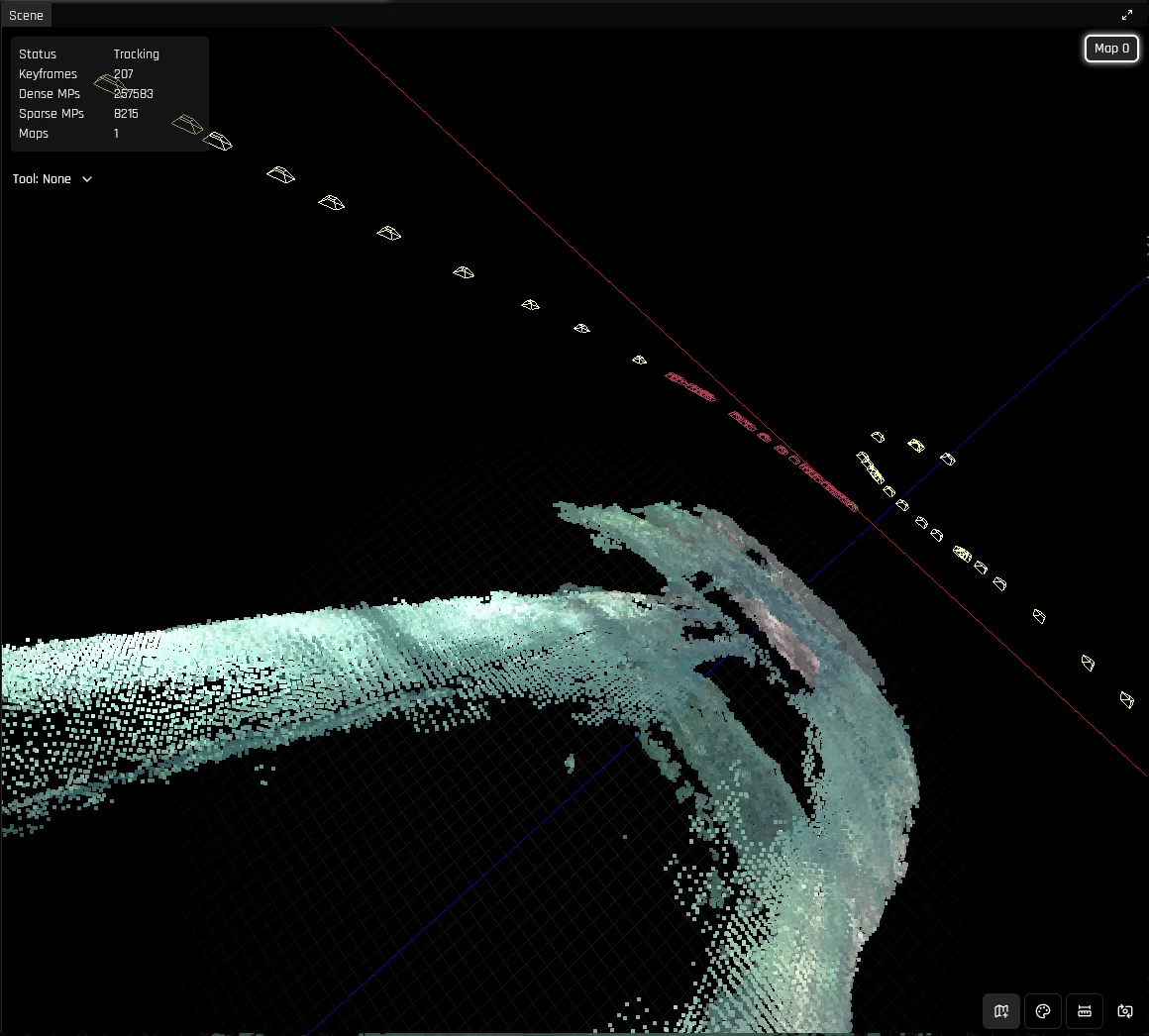
Punktsky før sløyfelukking med akkumulert feil
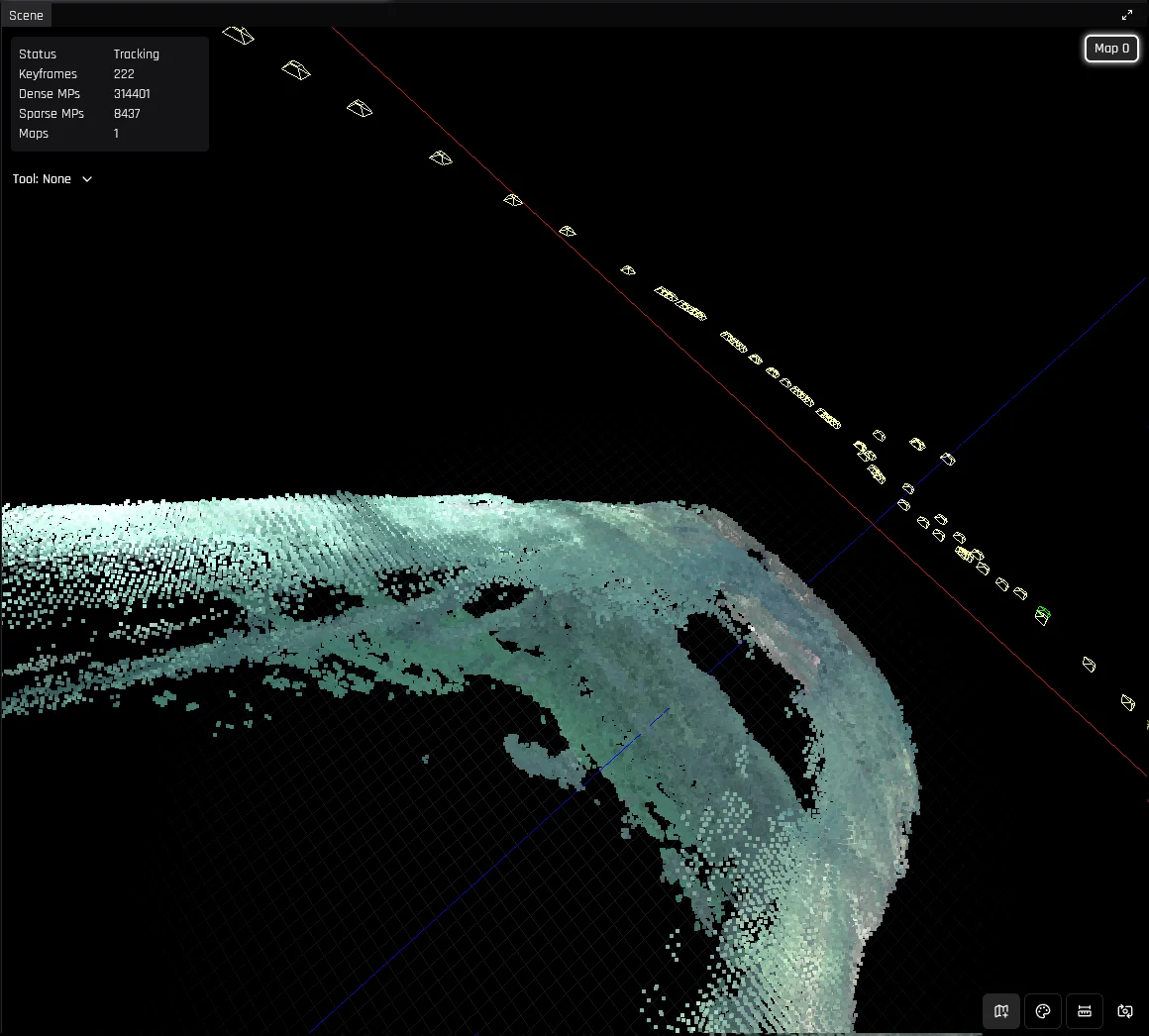
Punktsky etter sløyfelukking med korrigerte poser
Kart
Hvis sporingen mistes over en lengre periode, vil systemet opprette et nytt kart fra bunnen av. Alle tidligere kart lagres i minnet, og kan vises ved å klikke på etikettene deres i øverste høyre hjørne:
Det uthevede kartet er det som det for øyeblikket legges til i.

Verktøy og kontroller
Navigasjon
Når Scene-visningen er i fokus, bruk følgende kontroller for å bevege det virtuelle kameraet:
Kameraposisjonen kan tilbakestilles ved å trykke på denne knappen.
Ruler
Trykk Space for å pause strømmen. Trykk R eller velg Ruler-ikonet i nederste høyre hjørne for å aktivere Ruler-verktøyet. Velg to punkter for å se avstanden mellom dem.Fargemodus
Trykk C eller velg fargepalett-ikonet i nederste høyre hjørne for å veksle mellom Texture- og Coverage-visningsmoduser.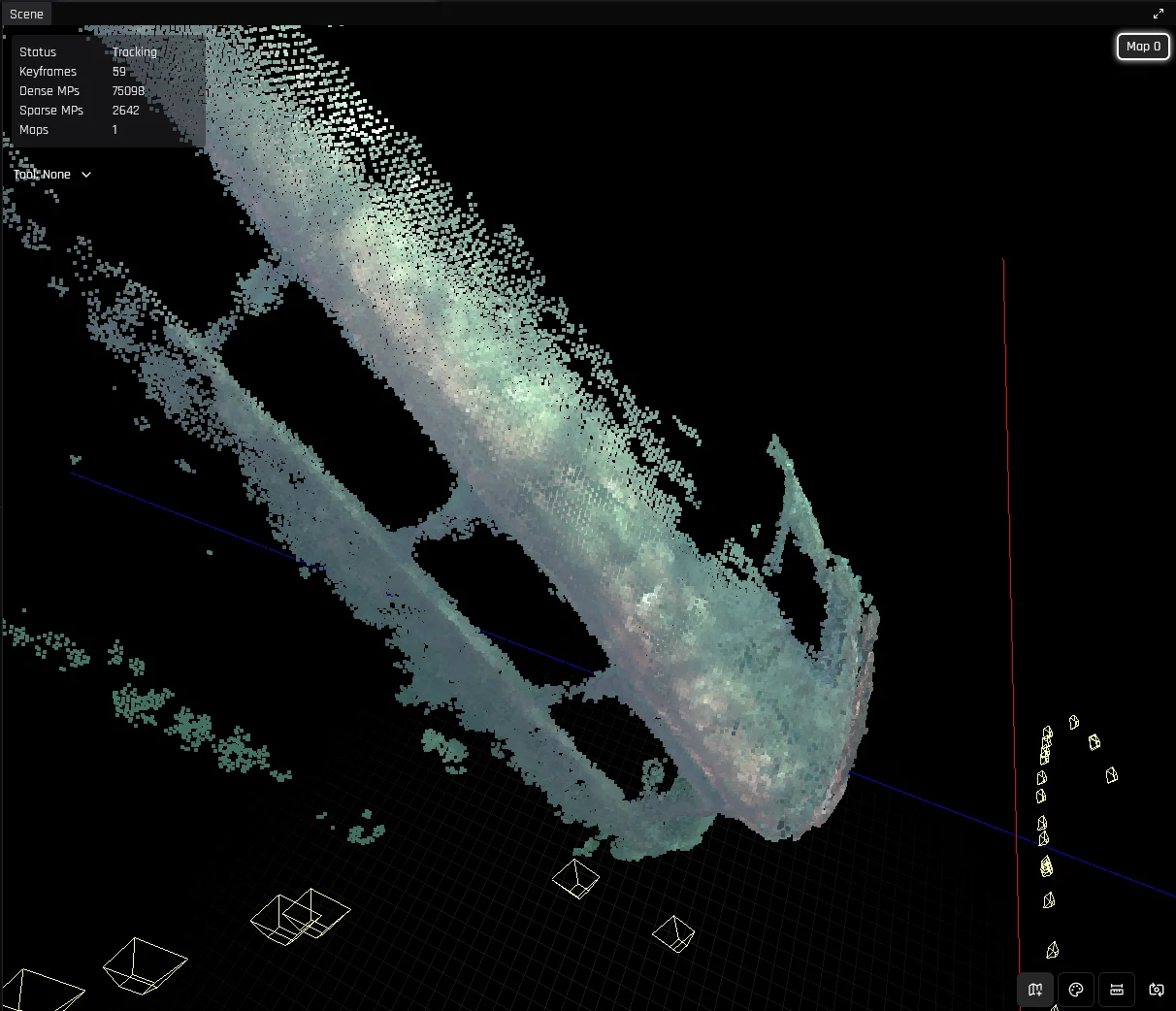
Texture mode viser den gjennomsnittlige observerte RGB-fargen for hvert punkt.
Coverage-modus viser den nærmeste avstanden som hvert punkt ble observert fra. Rødt er nærmere, blått er lenger unna. Bruker samme fargekartlegging som dybdevisningen.
Feilsøking
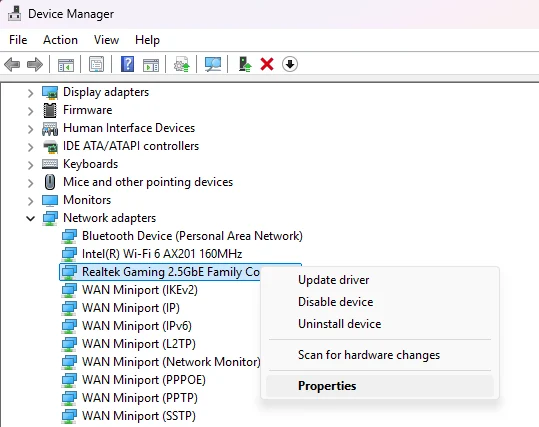
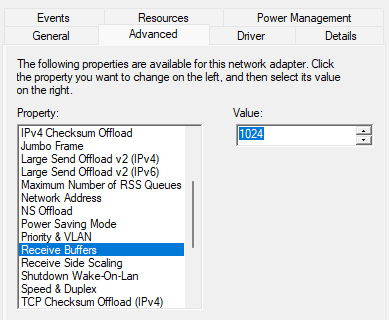
Konfigurere UDP-mottaksbuffere
RTP-pakker kan bli forkastet på grunn av utilstrekkelig UDP-mottaksbufferstørrelse. Vi anbefaler å øke den manuelt ettersom standarden ofte er utilstrekkelig for å fange opp fullstendige bilderammer.- Linux
- Windows
Vi anbefaler å sette maks OS-mottaksbufferstørrelse til 8 MB: