Oversikt
DeepWater Desktop er ledsagerprogramvaren for SVC Pro. Den mottar data fra SVC Pro og tilkoblet maskinvare for å produsere 3D-visualiseringer som: rektifiserte bilder, disparitetskart og punktskyer.Komme i gang med DeepWater Desktop
1
Åpne DeepWater Desktop
Pakk ut og åpne den nedlastede 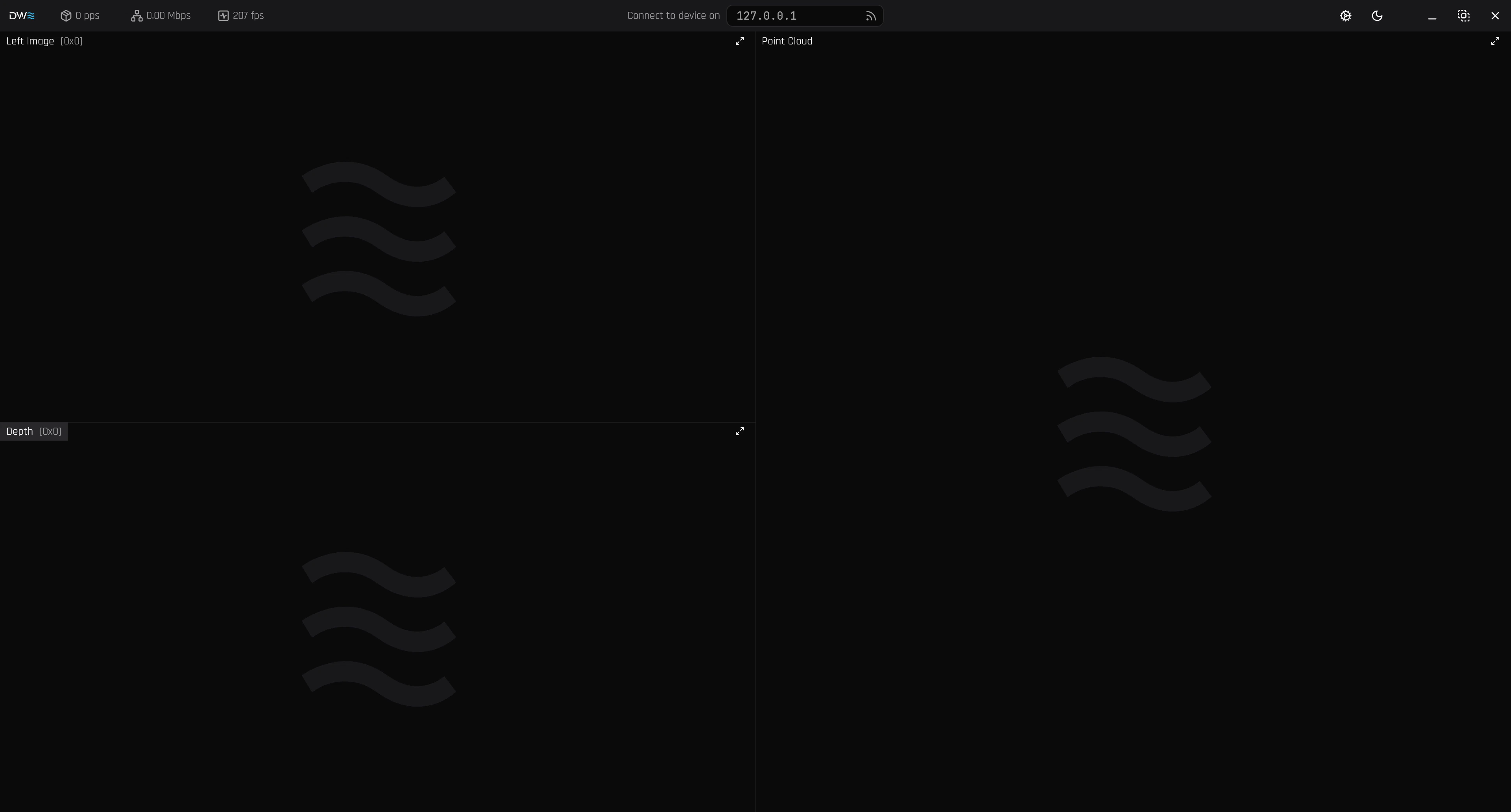
dwd-{version}-{platform}-x86-arkivfilen. Hvis du ikke har fått tilsendt en, kontakt teamet vårt på support@dwe.ai.
Kjør run-skriptet for å starte programmet.- Linux
- Windows
2
Koble til SVC Pro

192.168.2.2 er standard IP-adresse.
Hvis du har endret den, sørg for at du skriver inn riktig adresse til din SVC Pro.
Se SVC Pro – Kom i gang-veiledning.3
Legg til en strøm
Velg pluss-ikonet ved siden av serveradressen for å legge til en strøm.
4
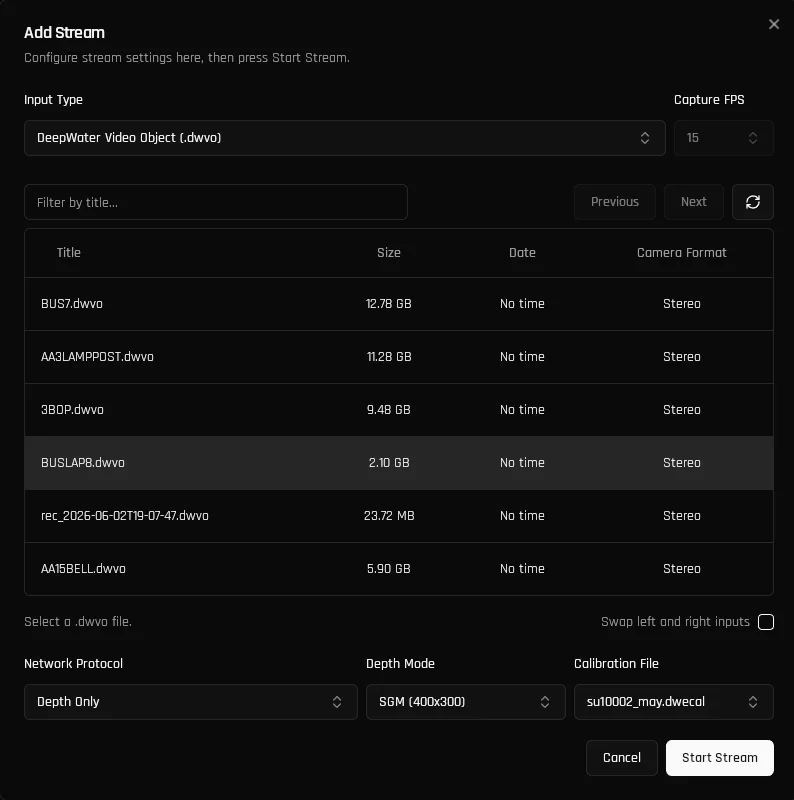
Konfigurer strømmen
Etter at du har lagt til en strøm, skal konfigurasjonsvinduet for strømmen dukke opp på skjermen. Avhengig av kravene dine, kan det være lurt å konfigurere strømmen annerledes.Generelt kan du konsultere følgende tabeller:
Deretter kan du velge kalibreringsfilen. Som standard vil riktig kalibrering være valgt. Hvis du har egendefinerte kalibreringsfiler, vil de også vises her.
- USB
- DWVO
Velg venstre kamera (vanligvis Leader hvis i Leader-Follower-modus), etterfulgt av høyre kamera.
For modularitet lagrer ikke kameraene posisjonsdataene sine, så du må konfigurere sidene manuelt.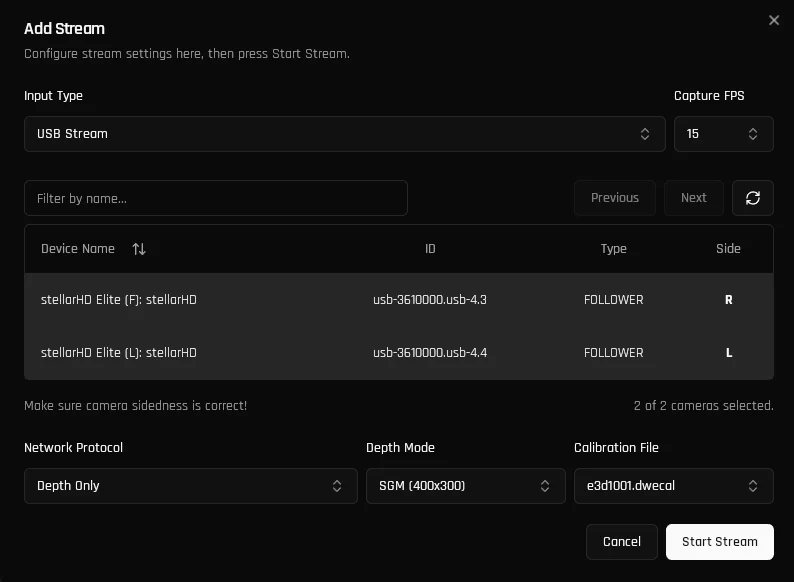
5
Suksess!
Du er klar! Når strømmen starter, vil DeepWater Desktop begynne å behandle dataene dine.Du skal nå se 3D-visualiseringene dine – inkludert rektifiserte bilder, disparitetskart og punktskyer – strømme aktivt i hovedgrensesnittet, akkurat som eksempelet nedenfor.