Conservez les paramètres par défaut pour la meilleure expérience prête à l’emploi. Le réglage manuel
est entièrement optionnel et réservé à l’optimisation avancée des performances.
Paramètres de suivi
Les performances de suivi VSLAM peuvent être optimisées pour votre environnement en ajustant les paramètres suivants.Paramètres du filtre
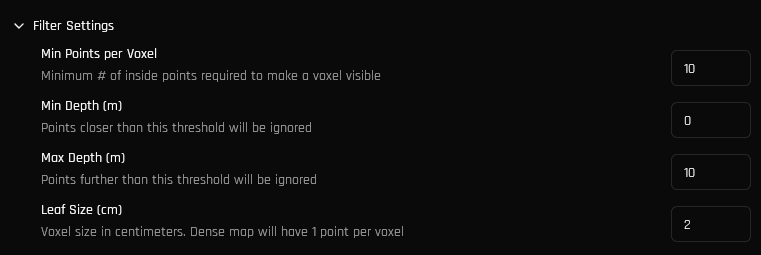
Un filtre voxel est utilisé pour assurer une distribution uniforme des points dans le nuage de points résultant. Les paramètres de filtre suivants peuvent être configurés.