Vue d’ensemble
DeepWater Desktop est le logiciel compagnon du SVC Pro. Il reçoit les données du SVC Pro et du matériel associé pour produire des visuels 3D tels que : images rectifiées, cartes de disparité et nuages de points.Premiers pas avec DeepWater Desktop
1
Ouvrir DeepWater Desktop
Décompressez et ouvrez l’archive 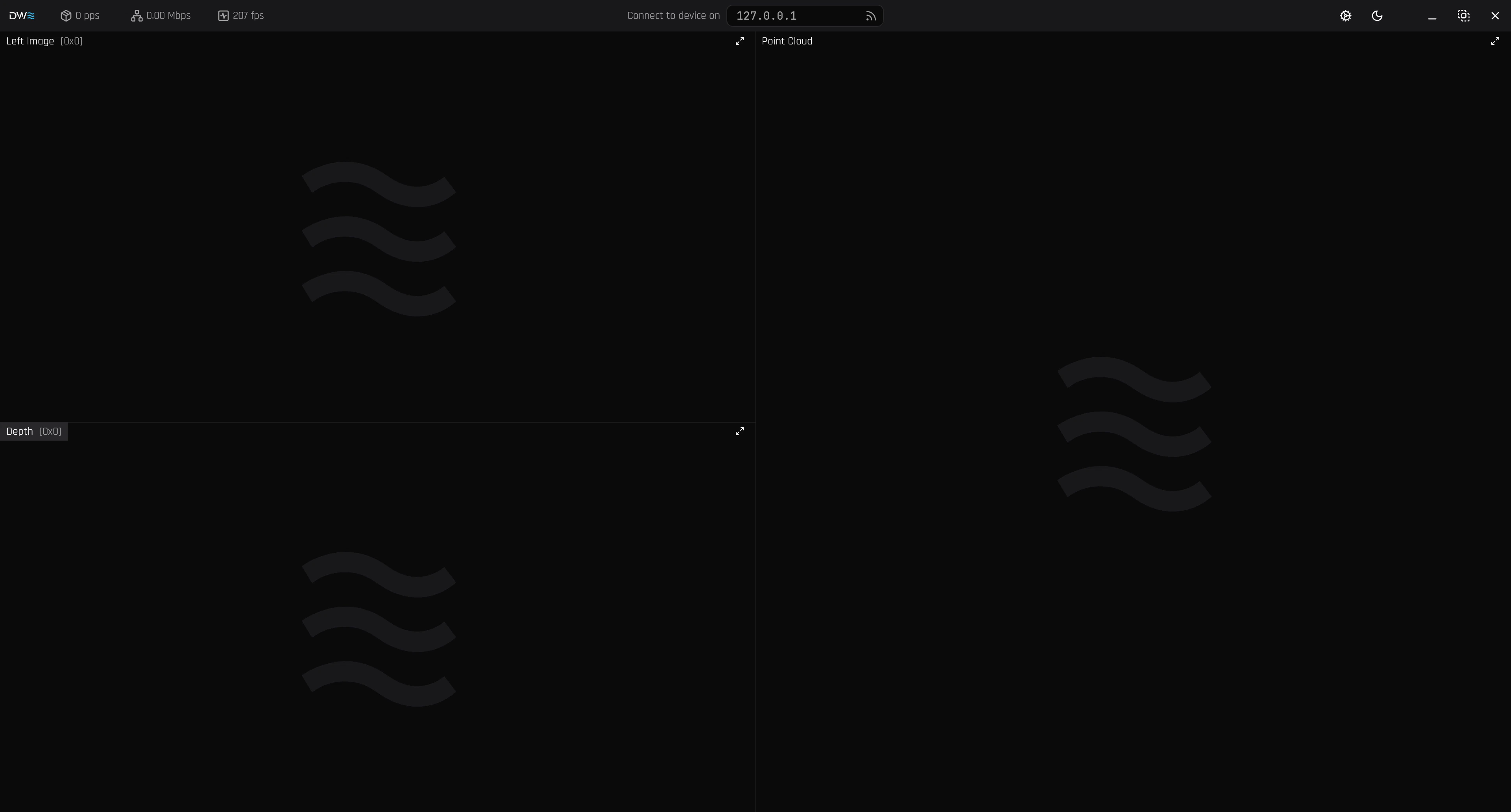
dwd-{version}-{platform}-x86 téléchargée. Si vous n’en avez pas reçu une, contactez notre équipe à support@dwe.ai.
Exécutez le script run pour démarrer le programme.- Linux
- Windows
2
Se connecter au SVC Pro

192.168.2.2 est l’adresse IP par défaut.
Si vous l’avez modifiée, assurez-vous de saisir l’adresse correcte de votre SVC Pro.
Reportez-vous au Guide de démarrage SVC Pro.3
Ajouter un flux
Cliquez sur l’icône plus à côté de l’adresse du serveur pour ajouter un flux.
4
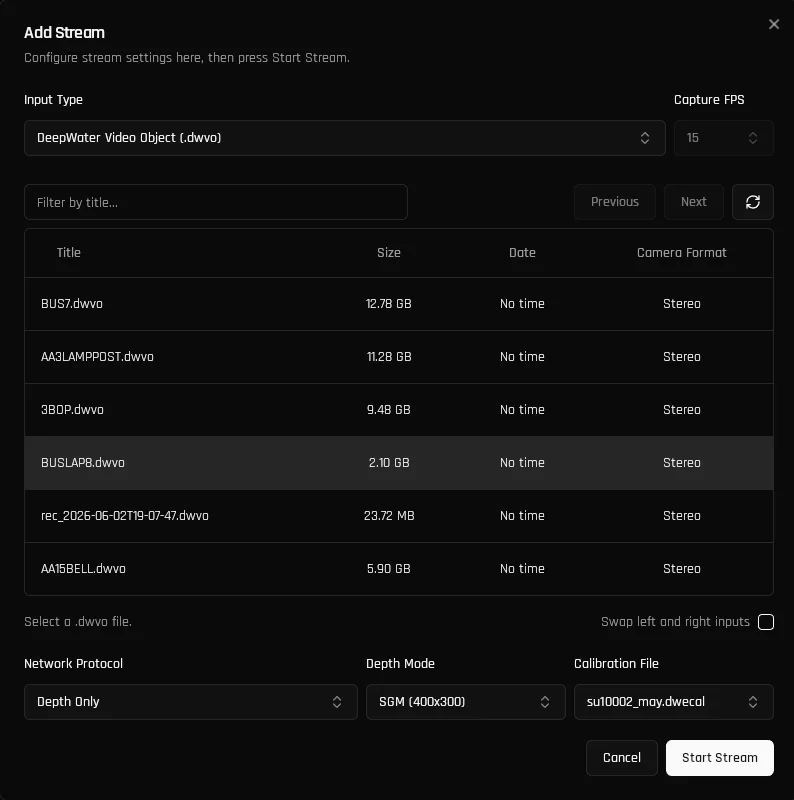
Configurer le flux
Après avoir ajouté un flux, la fenêtre de configuration du flux devrait apparaître à l’écran. Selon vos besoins, vous pouvez configurer le flux différemment.En général, vous pouvez vous référer aux tableaux suivants :
Ensuite, vous pouvez sélectionner le fichier de calibration. Par défaut, la calibration correcte sera déjà sélectionnée. Si vous disposez de fichiers de calibration personnalisés, ils apparaîtront également ici.
- USB
- DWVO
Veuillez sélectionner la caméra de gauche (généralement le Leader en mode Leader-Follower), puis la caméra de droite.
Pour des raisons de modularité, les caméras ne stockent pas leurs données de position, vous devrez donc configurer manuellement chaque côté.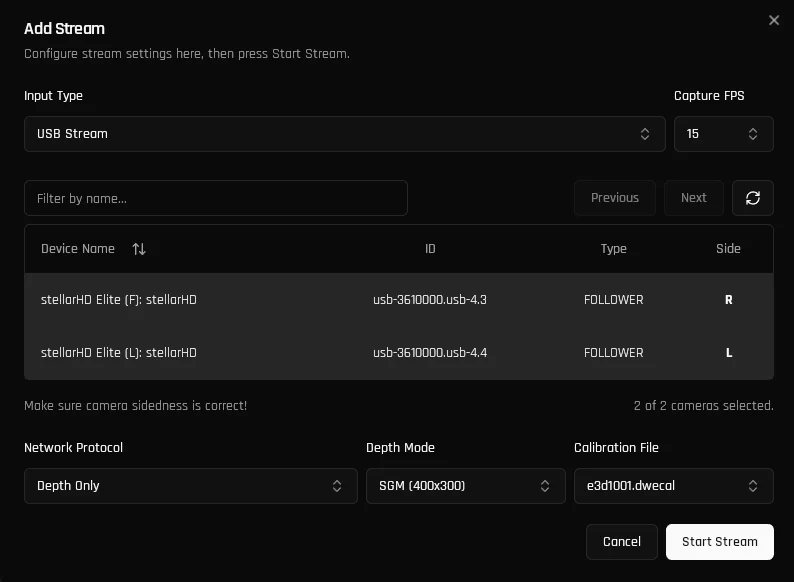
5
Succès !
Vous êtes prêt ! Une fois le flux lancé, DeepWater Desktop commencera à traiter vos données.Vous devriez maintenant voir vos visuels 3D — y compris les images rectifiées, les cartes de disparité et les nuages de points — diffusés activement dans l’interface principale, comme dans l’exemple ci-dessous.