Vue d’ensemble
DeepWater Desktop peut créer automatiquement une reconstruction dense de votre environnement, utile pour le Coverage Mapping en direct et les mesures.Prérequis
- Module SVC Pro — exécutant dweOS Pro
- Ordinateur/portable de surface — exécutant DeepWater Desktop
Paramètres de lancement
1
Changer le protocole réseau
Ouvrez la boîte de dialogue « Add Stream », sélectionnez vos caméras et passez le protocole réseau sur Coverage Mapping. Consultez notre guide de démarrage rapide pour savoir comment procéder.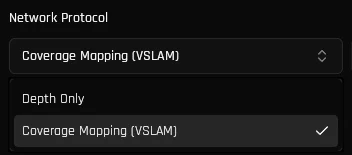
2
Ajuster les paramètres de suivi et de filtre (Optionnel)
Conservez les paramètres par défaut pour la meilleure expérience prête à l’emploi. Le réglage manuel
est entièrement optionnel et réservé à l’optimisation avancée des performances.
Paramètres de suivi et de filtre
Référence pour le réglage des paramètres de suivi VSLAM et du filtre voxel.
3
Démarrer le flux
Cliquez sur le bouton « Start Stream ». Une fois le flux lancé, DeepWater Desktop commencera à traiter vos données.
Vous devriez maintenant voir un nuage de points 3D se générer à mesure que votre caméra se déplace.Si vous prévoyez de post-traiter les données, démarrez également un enregistrement ici.
Fermetures de boucle
Tous les systèmes SLAM accumulent des erreurs au fil du temps. Pour corriger cela, nous utilisons le concept de fermetures de boucle — observer le même emplacement depuis la même pose à différents moments. DeepWater Desktop reconnaît automatiquement les fermetures de boucle et ajuste les poses et nuages de points précédemment mesurés en conséquence. Pour déclencher une fermeture de boucle, il suffit de revenir à une pose précédente et de faire face dans la même direction. Un message apparaîtra dans le coin inférieur droit :
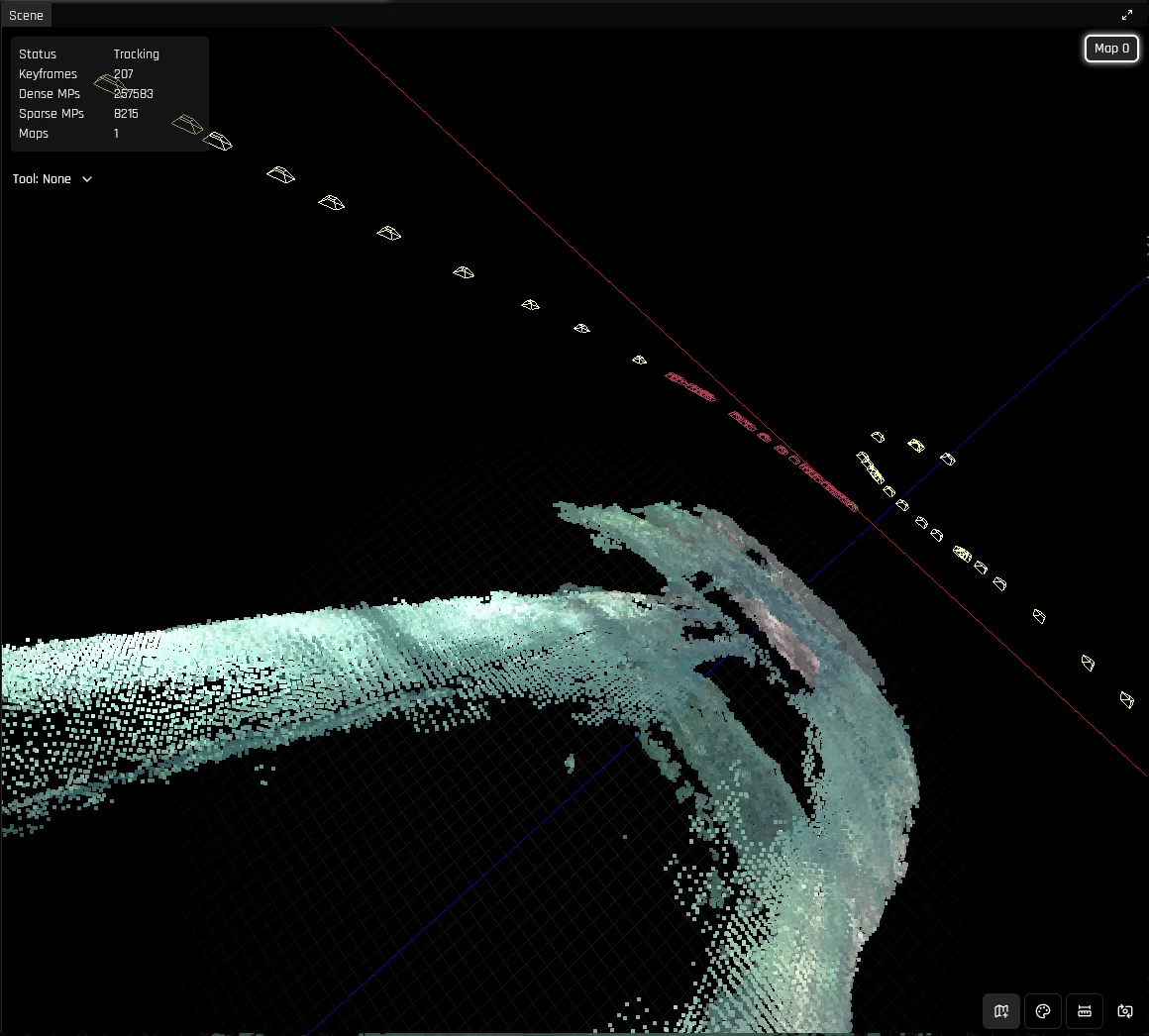
Nuage de points avant la fermeture de boucle avec erreur accumulée
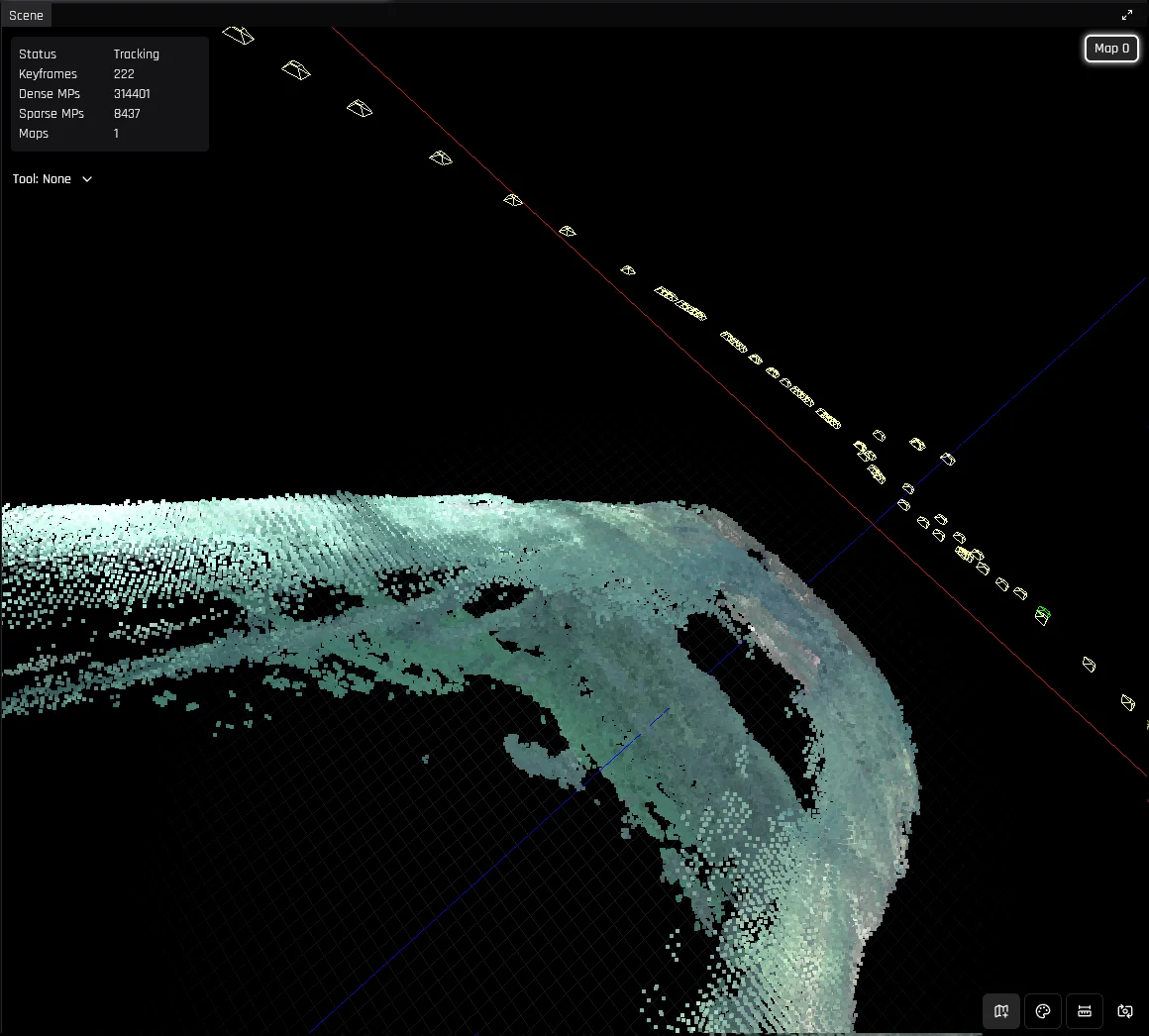
Nuage de points après la fermeture de boucle avec poses corrigées
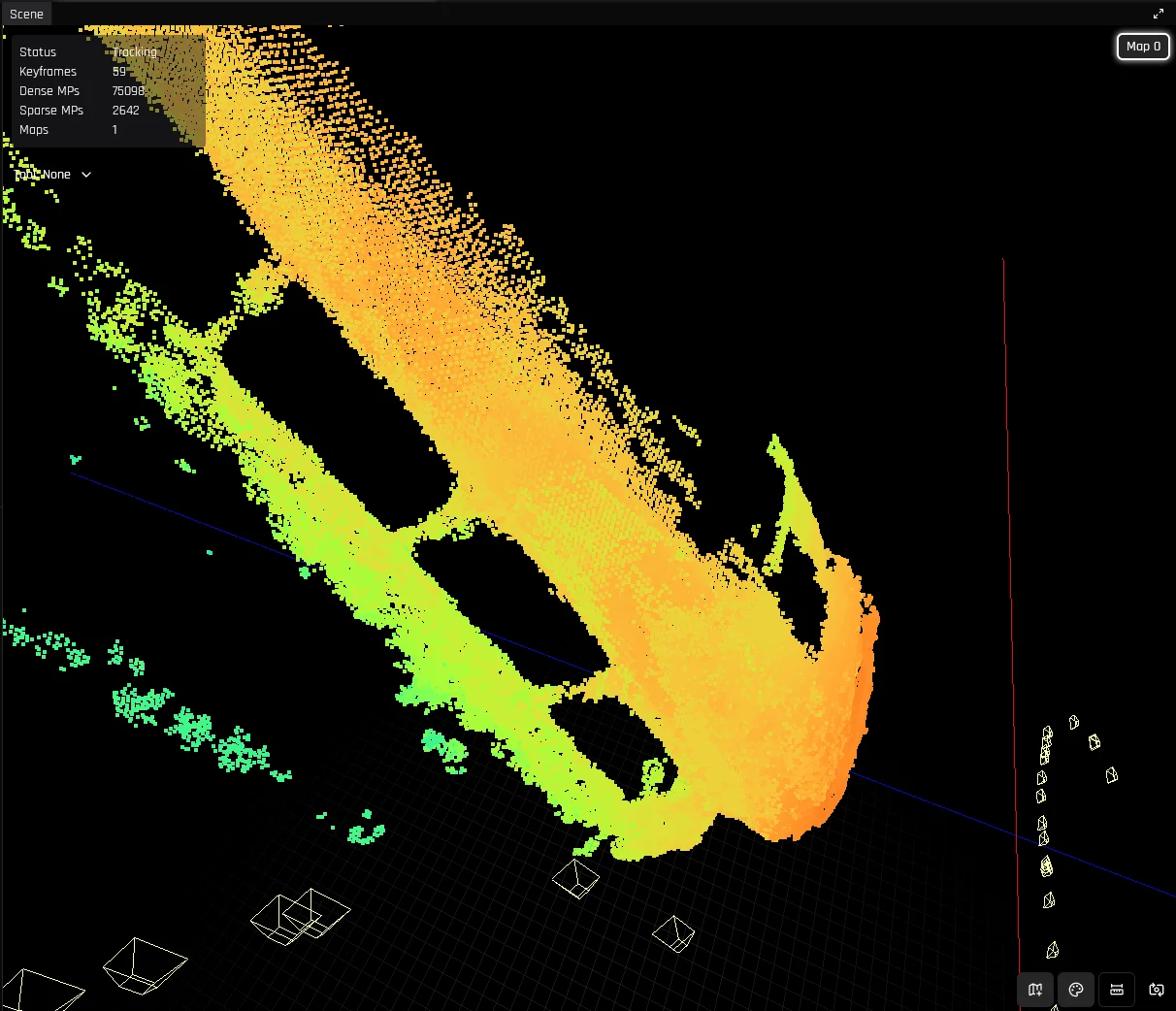
Cartes
En cas de perte de suivi prolongée, le système créera une nouvelle carte à partir de zéro. Toutes les cartes précédentes sont conservées en mémoire et peuvent être consultées en cliquant sur leurs étiquettes dans le coin supérieur droit :
La carte mise en évidence est celle à laquelle des données sont actuellement ajoutées.

Outils et contrôles
Navigation
Lorsque la vue Scène est active, utilisez les contrôles suivants pour déplacer la caméra virtuelle :
La position de la caméra peut être réinitialisée en appuyant sur ce bouton.
Ruler
Appuyez sur Espace pour mettre le flux en pause. Appuyez sur R ou sélectionnez l’icône Ruler dans le coin inférieur droit pour activer l’outil Ruler. Sélectionnez deux points pour voir la distance qui les sépare.Mode couleur
Appuyez sur C ou sélectionnez l’icône de palette de couleurs dans le coin inférieur droit pour basculer entre les modes d’affichage Texture et Coverage.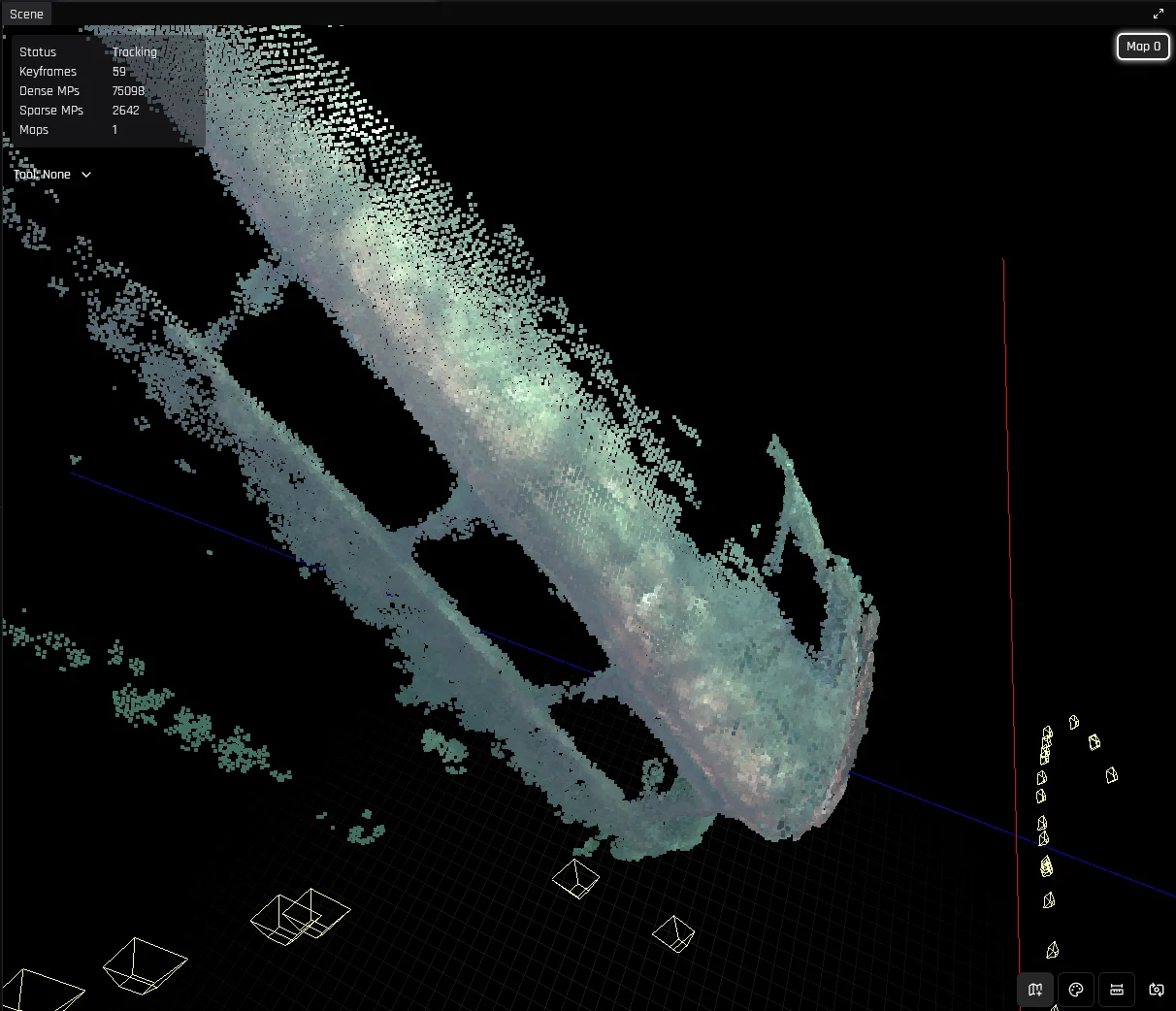
Texture mode affiche la couleur RGB moyenne observée pour chaque point.
Le mode Coverage affiche la distance la plus proche à laquelle chaque point a été observé. Rouge signifie plus proche, bleu plus éloigné. Utilise la même correspondance de couleurs que la vue de profondeur.
Dépannage
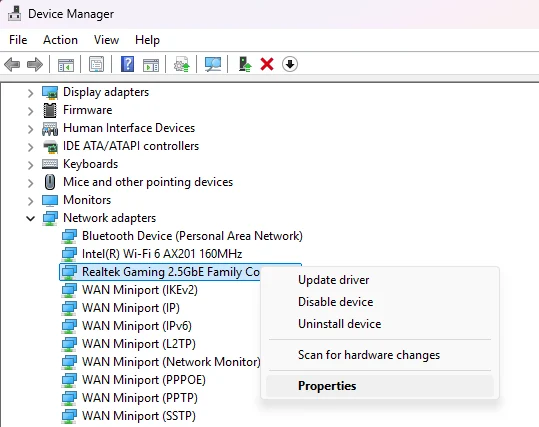
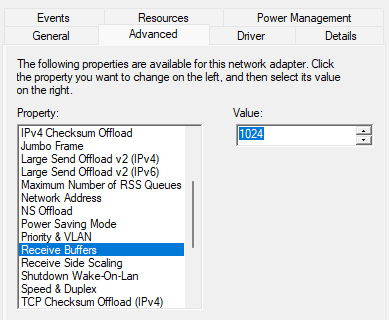
Configurer les tampons de réception UDP
Les paquets RTP peuvent être rejetés en raison d’une taille de tampon de réception UDP insuffisante. Nous recommandons de l’augmenter manuellement car la valeur par défaut est souvent insuffisante pour capturer correctement les trames complètes.- Linux
- Windows
Nous recommandons de définir la taille maximale du tampon de réception du système d’exploitation à 8 Mo :