Stick to the default parameters for the best out-of-the-box experience. Manual
tuning is entirely optional and reserved for advanced performance
optimization.
Tracking Parameters
VSLAM tracking performance can be optimized for your environment by adjusting the following parameters.Filter Parameters
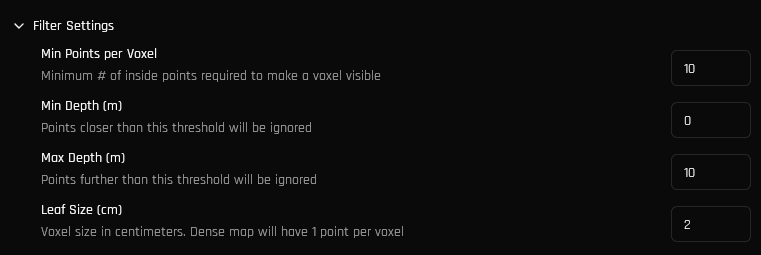
A voxel filter is used to ensure uniform point distribution in the resulting point cloud. The following filter settings can be configured.