Overview
DeepWater Desktop is the companion software for the SVC Pro. It receives data from the SVC Pro and attached hardware to produce 3D visuals such as: rectified images, disparity maps, and point clouds.Getting Started with DeepWater Desktop
1
Open DeepWater Desktop
Unzip and open the downloaded 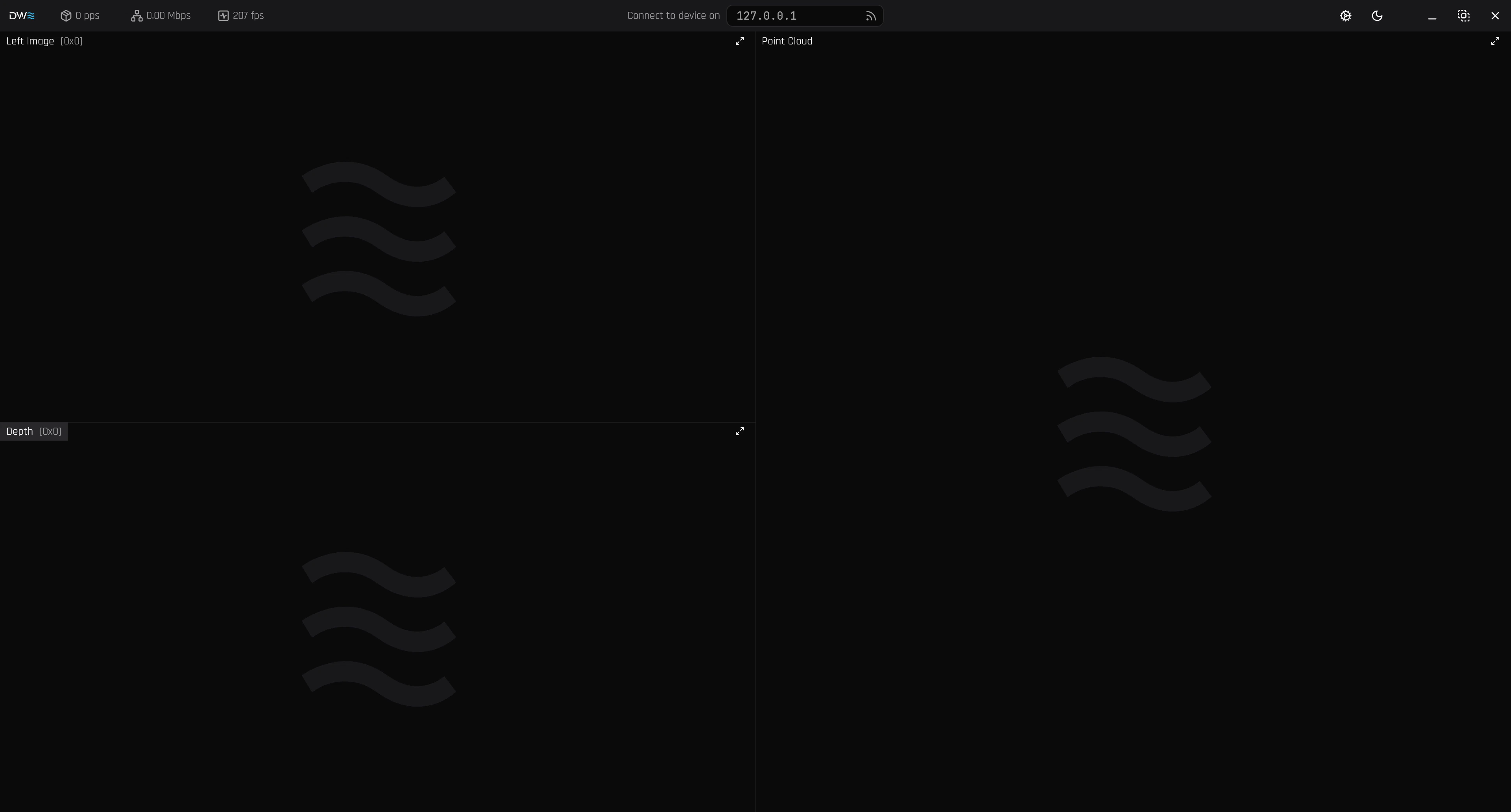
dwd-{version}-{platform}-x86 archive. If you haven’t received one, contact our team at support@dwe.ai.
Execute the run script to start the program.- Linux
- Windows
2
Connect to the SVC Pro

192.168.2.2 is the default IP Address.
If you changed it, make sure you input the correct address of your SVC Pro.
Refer to the SVC Pro - Getting Started Guide.3
Add a Stream
Select the plus icon next server address to add a stream.
4
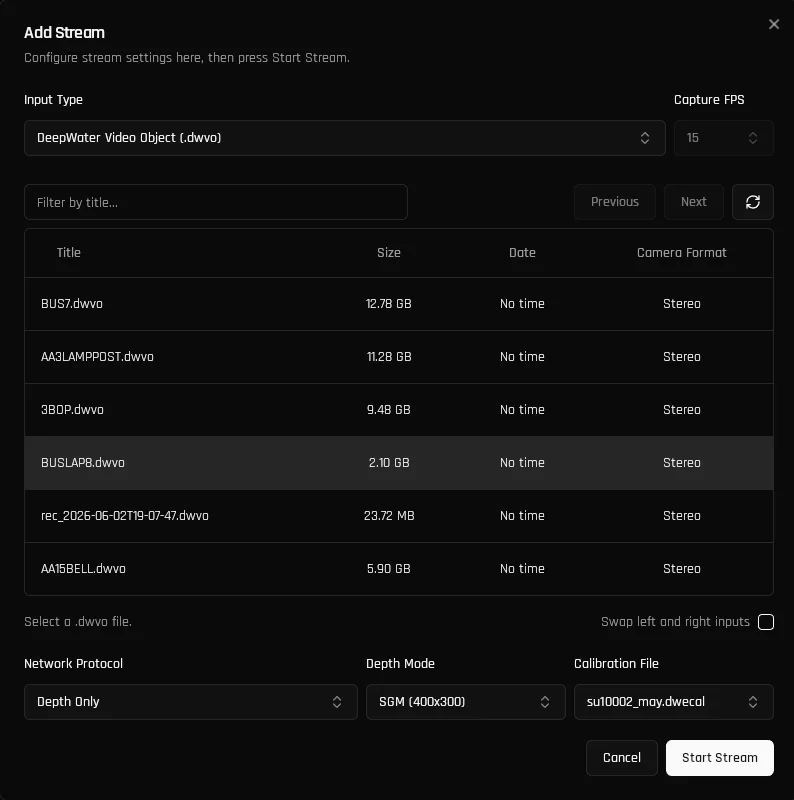
Configure the Stream
After adding a stream, the stream configuration stream should pop up on screen. Depending on your requirements, you may want to configure the stream differently.Generally, you can consult the following tables:
Next, you can select the calibration file. By default, it will have the correct calibration selected. If you have any custom calibration files, they will also appear here.
- USB
- DWVO
Please select the left camera (typically the Leader if in Leader-Follower mode), followed by the right camera.
For modularity, the cameras do not store their positional data, so you will need to configure the sides manually.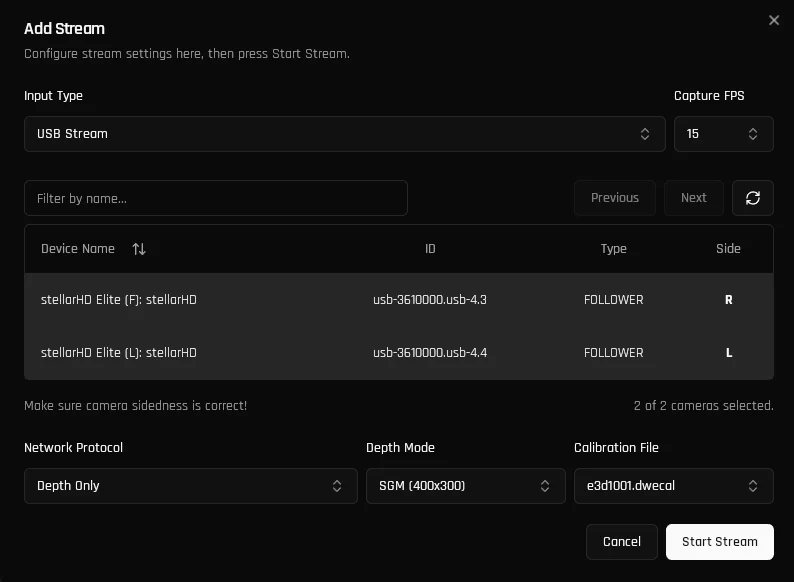
5
Success!
You are all set! Once the stream initiates, DeepWater Desktop will begin processing your data.You should now see your 3D visuals—including rectified images, disparity maps, and point clouds—actively streaming in the main interface, just like the example below.