개요
DeepWater Desktop은 SVC Pro의 컴패니언 소프트웨어입니다. SVC Pro 및 연결된 하드웨어로부터 데이터를 수신하여 정류된 이미지, 시차 맵, 포인트 클라우드와 같은 3D 비주얼을 생성합니다.DeepWater Desktop 시작하기
1
DeepWater Desktop 열기
다운로드한 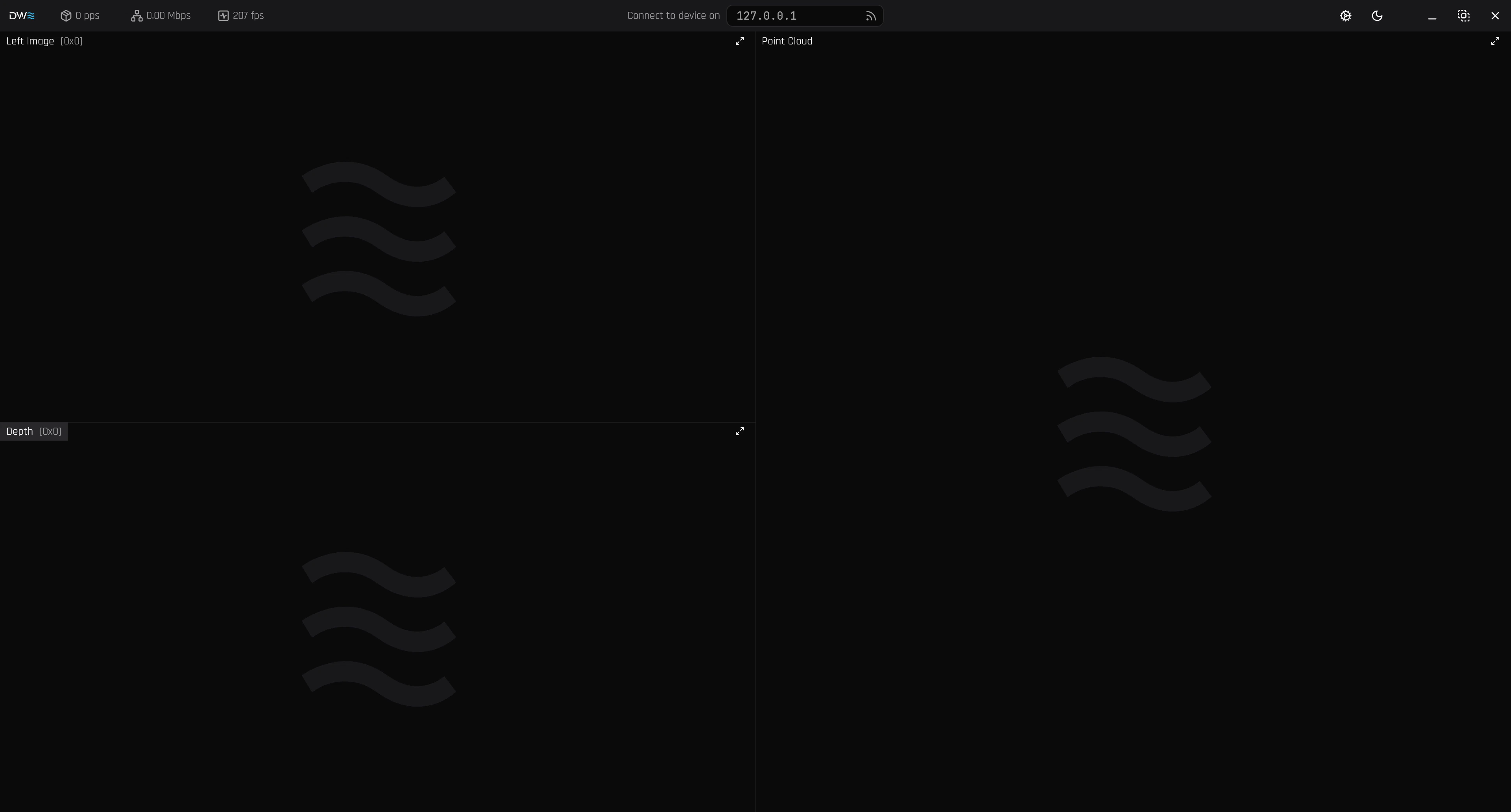
dwd-{version}-{platform}-x86 아카이브의 압축을 풀고 엽니다. 받지 못한 경우 support@dwe.ai로 지원팀에 문의하세요.
실행 스크립트를 실행하여 프로그램을 시작하세요.- Linux
- Windows
2
SVC Pro에 연결

192.168.2.2는 기본 IP 주소입니다.
변경한 경우, SVC Pro의 올바른 주소를 입력했는지 확인하세요.
SVC Pro - 시작하기 가이드를 참조하세요.3
스트림 추가
서버 주소 옆의 더하기 아이콘을 선택하여 스트림을 추가하세요.
4
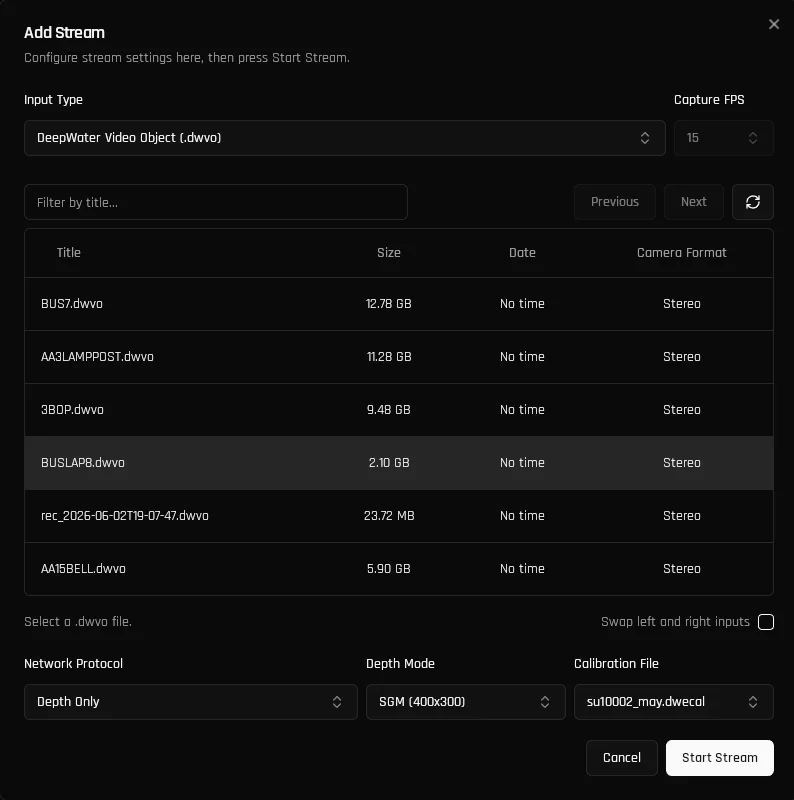
스트림 구성
스트림을 추가하면 스트림 구성 창이 화면에 나타납니다. 요구 사항에 따라 스트림을 다르게 구성할 수 있습니다.일반적으로 다음 표를 참고할 수 있습니다:
다음으로 캘리브레이션 파일을 선택할 수 있습니다. 기본적으로 올바른 캘리브레이션이 선택되어 있습니다. 사용자 지정 캘리브레이션 파일이 있다면 여기에도 표시됩니다.
- USB
- DWVO
왼쪽 카메라(일반적으로 Leader-Follower 모드의 Leader)를 먼저 선택한 다음 오른쪽 카메라를 선택하세요.
모듈성을 위해 카메라는 위치 데이터를 저장하지 않으므로 좌우를 수동으로 구성해야 합니다.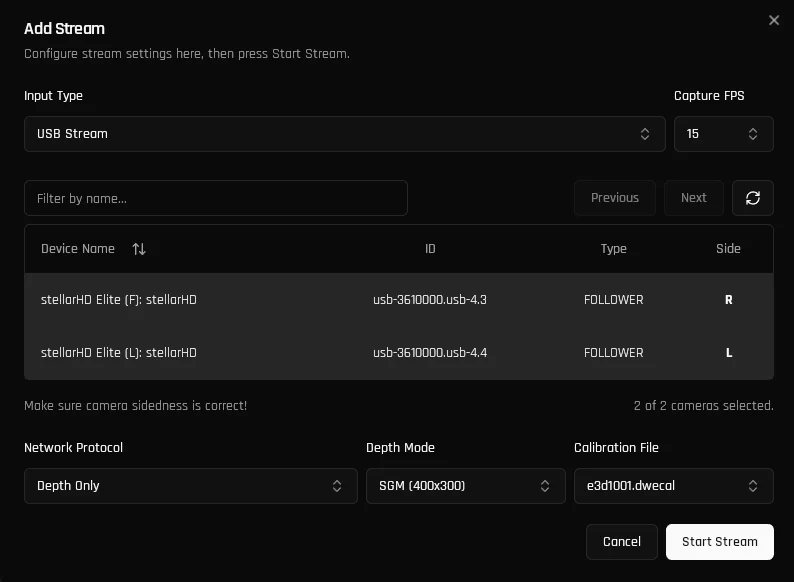
5
성공!
모든 준비가 완료되었습니다! 스트림이 시작되면 DeepWater Desktop이 데이터 처리를 시작합니다.이제 아래 예시처럼 정류된 이미지, 시차 맵, 포인트 클라우드를 포함한 3D 비주얼이 메인 인터페이스에서 실시간으로 스트리밍되는 것을 볼 수 있습니다.