> ## Documentation Index
> Fetch the complete documentation index at: https://docs.dwe.ai/llms.txt
> Use this file to discover all available pages before exploring further.
# Bildesynkronisering av flere kameraer
> En veiledning for hvordan du synkroniserer stellarHD-kameraer.
***Denne dokumentasjonen er fortsatt under forbedring og bygging!***
Både **elektrisk** og **programvarebasert** synkronisering kreves. Se nedenfor for detaljerte instruksjoner.
# Veiledning for elektrisk kabling
## Oversikt
Denne modusen er laget for konfigurasjoner **som ikke bruker et eksternt klokkesignal**.
Du vil bruke ett kamera i `leader`-modus (som sender ut et synkroniseringssignal) og alle resterende kameraer i `follower`-modus.
Klikk her for å se veiledningen for å oppdatere kameraet ditt mellom Leader- og Follower-modus.

 ***
## Kabling
***
## Kabling
 ### Eksempel
### Eksempel
 ## Oversikt
Denne modusen er laget for konfigurasjoner **som bruker et eksternt klokkesignal** for å sende ut synkroniseringssignalet til alle kameraer.
I denne modusen må alle kameraer settes til `follower`-modus.
Klikk her for å se veiledningen for å oppdatere kameraet ditt mellom Leader- og Follower-modus.
## Oversikt
Denne modusen er laget for konfigurasjoner **som bruker et eksternt klokkesignal** for å sende ut synkroniseringssignalet til alle kameraer.
I denne modusen må alle kameraer settes til `follower`-modus.
Klikk her for å se veiledningen for å oppdatere kameraet ditt mellom Leader- og Follower-modus.

 ***
## Kabling
Sjekk produktsiden for din spesifikke enhet for spesifikasjoner for ekstern bildesynkronisering.
***
## Kabling
Sjekk produktsiden for din spesifikke enhet for spesifikasjoner for ekstern bildesynkronisering.
 ***
## Generering av eksternt klokkesignal
### Arduino-integrasjon
**Arduino Uno (ATmega328P)** er for øyeblikket det eneste *bekreftede* fungerende kortet for denne konfigurasjonen.
Last ned kildekoden for PWM-biblioteket her: [ArduinoPWM v1.0.0](https://github.com/DeepWaterExploration/ArduinoPWM/archive/refs/tags/v1.0.0.zip)
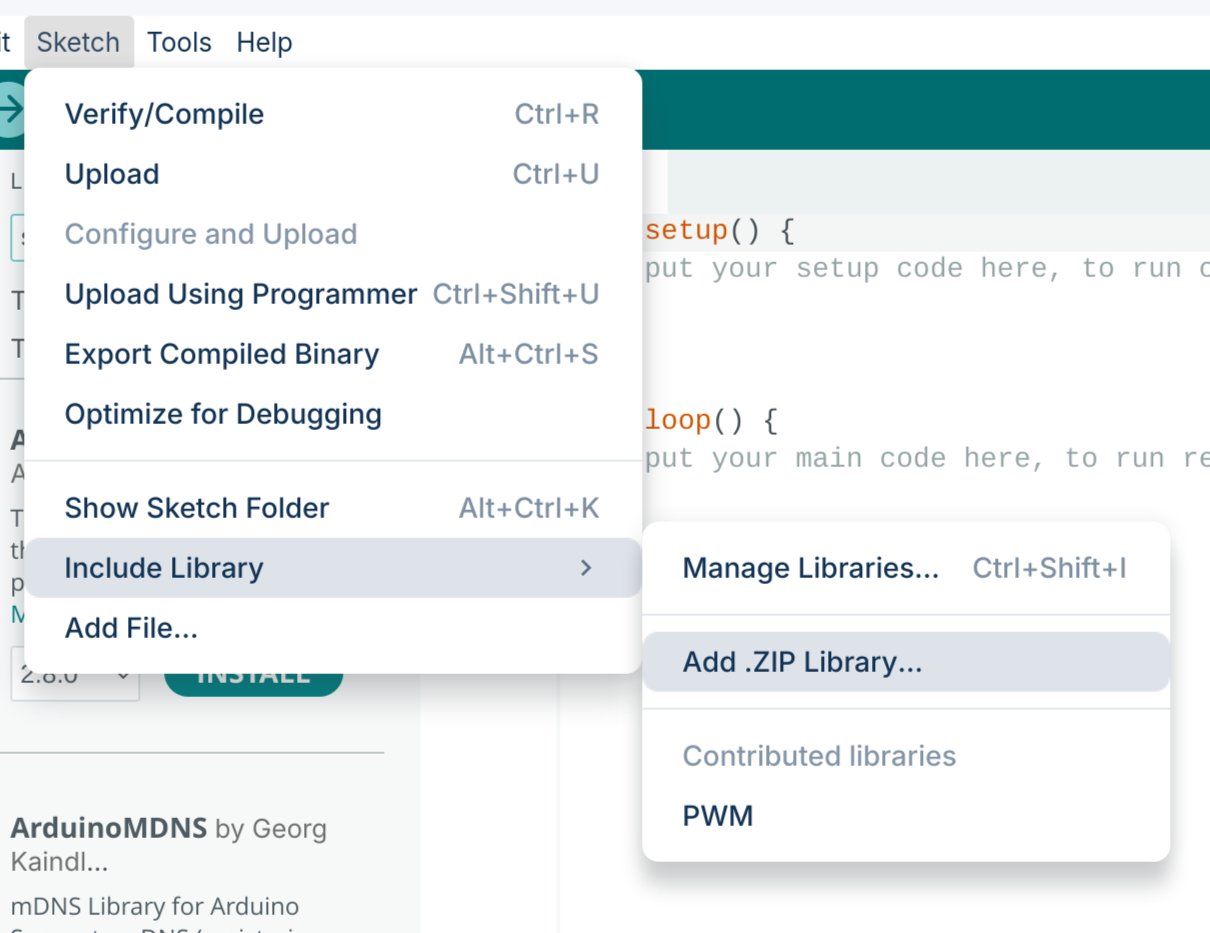
Importer det nedlastede `.ZIP`-biblioteket i Arduino IDE.
***
## Generering av eksternt klokkesignal
### Arduino-integrasjon
**Arduino Uno (ATmega328P)** er for øyeblikket det eneste *bekreftede* fungerende kortet for denne konfigurasjonen.
Last ned kildekoden for PWM-biblioteket her: [ArduinoPWM v1.0.0](https://github.com/DeepWaterExploration/ArduinoPWM/archive/refs/tags/v1.0.0.zip)
Importer det nedlastede `.ZIP`-biblioteket i Arduino IDE.
 Last opp en av de to skissene nedenfor til din Arduino.
* **Enkel kontroll:** Den raskeste måten å komme i gang på, men krever ny flashing av fastvaren for å justere FPS.
* **Seriell kontroll:** Lar deg justere frekvens og driftssyklus i sanntid uten å reflashe (innstillinger nullstilles hvis enheten mister strøm).
```cpp theme={null}
#include
// Pin configuration
int pin = 9; // Pin
int value = 127; // Initial value for the PWM duty cycle
// SET FREQUENCY HERE
float frequency = 60; // Initial frequency in Hz
void setup()
{
// Initialize all timers except for timer0 to save timekeeping tasks
InitTimersSafe();
// Set the initial PWM frequency and duty cycle
if (SetPinFrequencySafe(pin, frequency))
{
pwmWrite(pin, value);
Serial.println("PWM frequency and initial duty cycle set.");
}
else
{
Serial.println("Failed to set frequency.");
}
}
```
```cpp theme={null}
#include
// Pin configuration
int pin = 9; // Pin
int value = 127; // Initial value for the PWM duty cycle
float frequency = 60; // Initial frequency in Hz
void setup()
{
Serial.begin(9600);
// Initialize all timers except for timer0 to save timekeeping tasks
InitTimersSafe();
// Set the initial PWM frequency and duty cycle
if (SetPinFrequencySafe(pin, frequency))
{
pwmWrite(pin, value);
Serial.println("PWM frequency and initial duty cycle set.");
}
else
{
Serial.println("Failed to set frequency.");
}
}
void loop()
{
if (Serial.available())
{
// Read frequency and duty cycle values over Serial
String inputString = Serial.readStringUntil('\n');
inputString.trim();
int freqDutySplitIndex = inputString.indexOf(',');
if (freqDutySplitIndex != -1)
{
String freqStr = inputString.substring(0, freqDutySplitIndex);
String dutyStr = inputString.substring(freqDutySplitIndex + 1);
// Parse floats
float newFrequency = freqStr.toFloat();
int newDutyCycle = dutyStr.toInt();
// Validate frequency range
if (newFrequency >= 1 && newFrequency <= 2000000)
{
// Set the PWM frequency and apply duty cycle
if (SetPinFrequencySafe(pin, newFrequency))
{
value = map(constrain(newDutyCycle, 0, 100), 0, 100, 0, 255);
pwmWrite(pin, value);
Serial.print("Set frequency to: ");
Serial.print(newFrequency);
Serial.print(" Hz, duty cycle to: ");
Serial.print(newDutyCycle);
Serial.println("%");
}
else
{
Serial.println("Failed to set new frequency.");
}
}
else
{
Serial.println("Invalid frequency value.");
}
}
else
{
Serial.println("Invalid input format. Use frequency,dutycycle (e.g., 60,50).");
}
}
}
```
Denne koden lar deg endre PWM-signalet i sanntid. Åpne den serielle monitoren på `9600` baud og send kommandoer i formatet `{FREKVENS},{DRIFTSSYKLUS}` (f.eks. `60,50` for 60 Hz med 50 % driftssyklus).
***
## Python-bibliotek for synkronisert video (Linux)
I tillegg til vår kommende SDK tilbyr vi for øyeblikket en enkel Python-prosess for å hente synkroniserte bilder fra dine kameraoppsett. *(Merk: Dette kan bli faset ut til fordel for den fullt utrustede SDK-en i fremtiden.)*
Følg vår GitHub-veiledning for å installere og bruke vårt egendefinerte Python-bibliotek for Linux.
***
## Synkronisert sammensydd video
Dette vil gå gjennom bruk av GStreamer for å synkronisere og sette sammen to videostrømmer.
Deretter opprette en virtuell enhet som kan brukes i andre programmer.
Installer de nødvendige avhengighetene med følgende kommando:
```bash theme={null}
sudo apt install -y libx264-dev libjpeg-dev \
libglib2.0-dev libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev \
gstreamer1.0-tools gstreamer1.0-x gstreamer1.0-plugins-base gstreamer1.0-plugins-good \
gstreamer1.0-plugins-bad gstreamer1.0-libav libgstreamer-plugins-bad1.0-dev \
gstreamer1.0-plugins-ugly gstreamer1.0-gl \
v4l-utils
```
Kjør følgende kommando for å finne dine tilkoblede kameraer:
```bash theme={null}
v4l2-ctl --list-devices
```
**Eksempel på utdata:**
```text theme={null}
stellarHD Leader: stellarHD Lea (usb-0000:00:14.0-8.3):
/dev/video0
/dev/video1
/dev/media0
stellarHD Follower: stellarHD F (usb-0000:00:14.0-8.4):
/dev/video2
/dev/video3
/dev/media1
```
Identifiser enhets-ID-ene til de to kameraene du vil bruke, og velg deretter et enhets-ID-nummer som **ikke** er oppført.
I dette eksempelet vil vi bruke `9` (siden det er ubrukt ovenfor) for å opprette en virtuell enhet kalt `stellarHD_stitched`. Oppdater `9` i kommandoen nedenfor for å matche den ubrukte ID-en du har valgt:
```bash theme={null}
sudo modprobe v4l2loopback video_nr=9 \
card_label=stellarHD_stitched exclusive_caps=1
```
Start pipelinen for å opprette den sammensydde videoen og send strømmen til den nye virtuelle enheten:
```bash theme={null}
gst-launch-1.0 -v \
compositor name=mix \
sink_0::xpos=0 sink_0::ypos=0 sink_0::alpha=1 \
sink_1::xpos=1600 sink_1::ypos=0 sink_1::alpha=1 \
! jpegenc ! jpegdec ! videoconvert ! v4l2sink device=/dev/video9 \
v4l2src device=/dev/video0 ! image/jpeg,width=1600,framerate=60/1 ! jpegdec ! videorate ! mix.sink_0 \
v4l2src device=/dev/video2 ! image/jpeg,width=1600,framerate=60/1 ! jpegdec ! videorate ! mix.sink_1
```
Du må la denne kommandoen kjøre mens du bruker de synkroniserte, sammensydde videoene. Du kan endre denne kommandoen for å legge til flere kameraer, endre oppløsninger/bildefrekvenser eller endre oppsettet.
Følg eksempelkoden vår for å bruke `/dev/video9` i OpenCV.
For å fjerne loopback-enheten på en trygg måte kan du enten starte datamaskinen på nytt eller kjøre følgende sekvens av kommandoer:
**1. Identifiser programmer som for øyeblikket bruker loopback-enheten:**
```bash theme={null}
sudo lsof /dev/video*
```
**2. Avslutt prosessene ved hjelp av PID-numrene (Process ID):**
```bash theme={null}
sudo kill
```
**3. Fjern loopback-enheten:**
```bash theme={null}
sudo modprobe -r v4l2loopback
```
Last opp en av de to skissene nedenfor til din Arduino.
* **Enkel kontroll:** Den raskeste måten å komme i gang på, men krever ny flashing av fastvaren for å justere FPS.
* **Seriell kontroll:** Lar deg justere frekvens og driftssyklus i sanntid uten å reflashe (innstillinger nullstilles hvis enheten mister strøm).
```cpp theme={null}
#include
// Pin configuration
int pin = 9; // Pin
int value = 127; // Initial value for the PWM duty cycle
// SET FREQUENCY HERE
float frequency = 60; // Initial frequency in Hz
void setup()
{
// Initialize all timers except for timer0 to save timekeeping tasks
InitTimersSafe();
// Set the initial PWM frequency and duty cycle
if (SetPinFrequencySafe(pin, frequency))
{
pwmWrite(pin, value);
Serial.println("PWM frequency and initial duty cycle set.");
}
else
{
Serial.println("Failed to set frequency.");
}
}
```
```cpp theme={null}
#include
// Pin configuration
int pin = 9; // Pin
int value = 127; // Initial value for the PWM duty cycle
float frequency = 60; // Initial frequency in Hz
void setup()
{
Serial.begin(9600);
// Initialize all timers except for timer0 to save timekeeping tasks
InitTimersSafe();
// Set the initial PWM frequency and duty cycle
if (SetPinFrequencySafe(pin, frequency))
{
pwmWrite(pin, value);
Serial.println("PWM frequency and initial duty cycle set.");
}
else
{
Serial.println("Failed to set frequency.");
}
}
void loop()
{
if (Serial.available())
{
// Read frequency and duty cycle values over Serial
String inputString = Serial.readStringUntil('\n');
inputString.trim();
int freqDutySplitIndex = inputString.indexOf(',');
if (freqDutySplitIndex != -1)
{
String freqStr = inputString.substring(0, freqDutySplitIndex);
String dutyStr = inputString.substring(freqDutySplitIndex + 1);
// Parse floats
float newFrequency = freqStr.toFloat();
int newDutyCycle = dutyStr.toInt();
// Validate frequency range
if (newFrequency >= 1 && newFrequency <= 2000000)
{
// Set the PWM frequency and apply duty cycle
if (SetPinFrequencySafe(pin, newFrequency))
{
value = map(constrain(newDutyCycle, 0, 100), 0, 100, 0, 255);
pwmWrite(pin, value);
Serial.print("Set frequency to: ");
Serial.print(newFrequency);
Serial.print(" Hz, duty cycle to: ");
Serial.print(newDutyCycle);
Serial.println("%");
}
else
{
Serial.println("Failed to set new frequency.");
}
}
else
{
Serial.println("Invalid frequency value.");
}
}
else
{
Serial.println("Invalid input format. Use frequency,dutycycle (e.g., 60,50).");
}
}
}
```
Denne koden lar deg endre PWM-signalet i sanntid. Åpne den serielle monitoren på `9600` baud og send kommandoer i formatet `{FREKVENS},{DRIFTSSYKLUS}` (f.eks. `60,50` for 60 Hz med 50 % driftssyklus).
***
## Python-bibliotek for synkronisert video (Linux)
I tillegg til vår kommende SDK tilbyr vi for øyeblikket en enkel Python-prosess for å hente synkroniserte bilder fra dine kameraoppsett. *(Merk: Dette kan bli faset ut til fordel for den fullt utrustede SDK-en i fremtiden.)*
Følg vår GitHub-veiledning for å installere og bruke vårt egendefinerte Python-bibliotek for Linux.
***
## Synkronisert sammensydd video
Dette vil gå gjennom bruk av GStreamer for å synkronisere og sette sammen to videostrømmer.
Deretter opprette en virtuell enhet som kan brukes i andre programmer.
Installer de nødvendige avhengighetene med følgende kommando:
```bash theme={null}
sudo apt install -y libx264-dev libjpeg-dev \
libglib2.0-dev libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev \
gstreamer1.0-tools gstreamer1.0-x gstreamer1.0-plugins-base gstreamer1.0-plugins-good \
gstreamer1.0-plugins-bad gstreamer1.0-libav libgstreamer-plugins-bad1.0-dev \
gstreamer1.0-plugins-ugly gstreamer1.0-gl \
v4l-utils
```
Kjør følgende kommando for å finne dine tilkoblede kameraer:
```bash theme={null}
v4l2-ctl --list-devices
```
**Eksempel på utdata:**
```text theme={null}
stellarHD Leader: stellarHD Lea (usb-0000:00:14.0-8.3):
/dev/video0
/dev/video1
/dev/media0
stellarHD Follower: stellarHD F (usb-0000:00:14.0-8.4):
/dev/video2
/dev/video3
/dev/media1
```
Identifiser enhets-ID-ene til de to kameraene du vil bruke, og velg deretter et enhets-ID-nummer som **ikke** er oppført.
I dette eksempelet vil vi bruke `9` (siden det er ubrukt ovenfor) for å opprette en virtuell enhet kalt `stellarHD_stitched`. Oppdater `9` i kommandoen nedenfor for å matche den ubrukte ID-en du har valgt:
```bash theme={null}
sudo modprobe v4l2loopback video_nr=9 \
card_label=stellarHD_stitched exclusive_caps=1
```
Start pipelinen for å opprette den sammensydde videoen og send strømmen til den nye virtuelle enheten:
```bash theme={null}
gst-launch-1.0 -v \
compositor name=mix \
sink_0::xpos=0 sink_0::ypos=0 sink_0::alpha=1 \
sink_1::xpos=1600 sink_1::ypos=0 sink_1::alpha=1 \
! jpegenc ! jpegdec ! videoconvert ! v4l2sink device=/dev/video9 \
v4l2src device=/dev/video0 ! image/jpeg,width=1600,framerate=60/1 ! jpegdec ! videorate ! mix.sink_0 \
v4l2src device=/dev/video2 ! image/jpeg,width=1600,framerate=60/1 ! jpegdec ! videorate ! mix.sink_1
```
Du må la denne kommandoen kjøre mens du bruker de synkroniserte, sammensydde videoene. Du kan endre denne kommandoen for å legge til flere kameraer, endre oppløsninger/bildefrekvenser eller endre oppsettet.
Følg eksempelkoden vår for å bruke `/dev/video9` i OpenCV.
For å fjerne loopback-enheten på en trygg måte kan du enten starte datamaskinen på nytt eller kjøre følgende sekvens av kommandoer:
**1. Identifiser programmer som for øyeblikket bruker loopback-enheten:**
```bash theme={null}
sudo lsof /dev/video*
```
**2. Avslutt prosessene ved hjelp av PID-numrene (Process ID):**
```bash theme={null}
sudo kill
```
**3. Fjern loopback-enheten:**
```bash theme={null}
sudo modprobe -r v4l2loopback
```