> ## Documentation Index
> Fetch the complete documentation index at: https://docs.dwe.ai/llms.txt
> Use this file to discover all available pages before exploring further.
# Sporings- og filterparametere
Hold deg til standardparameterne for best mulig opplevelse rett ut av boksen. Manuell
finjustering er helt valgfritt og forbeholdt avansert ytelsesoptimalisering.
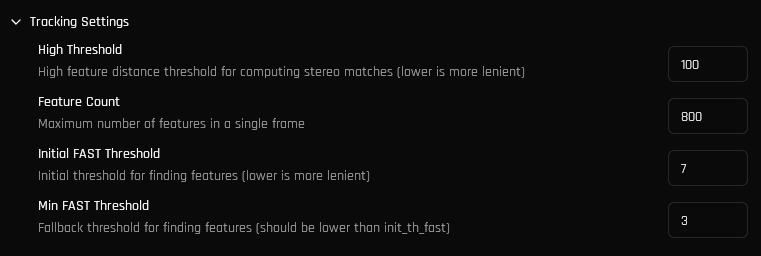
## Sporingsparametere
VSLAM-sporingsytelsen kan optimaliseres for ditt miljø ved å justere følgende parametere.
 | Parameter | Hva den gjør |
| ---------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| High Threshold | Kontrollerer hvor lempelig stereomatching-algoritmen er. Lavere er mer lempelig, høyere er mer nøyaktig. |
| Feature Count | Maksimalt tillatt antall særtrekk i én enkelt bilderamme. Høyere antall særtrekk øker sjansen for at sløyfelukkinger/kartsammenslåinger skjer, på bekostning av ytelse. |
| Initial FAST Threshold | Innledende FAST-terskel brukt for særtrekksdeteksjon. Lavere terskel øker oppdagede særtrekk, men øker sannsynligheten for feilaktige særtrekksmatcher på tvers av rammer. |
| Min FAST Threshold | Reserve-FAST-terskel som brukes hvis den innledende terskelen ikke fant nok særtrekk. |
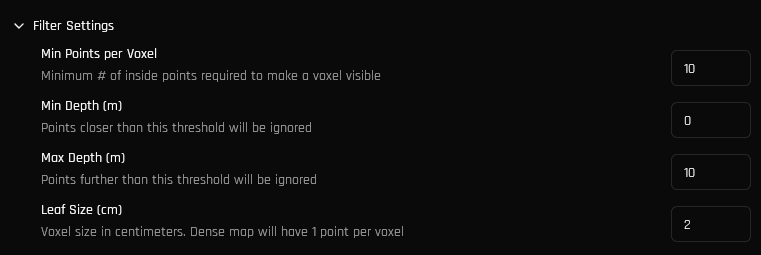
## Filterparametere
Et voxel-filter brukes for å sikre jevn punktfordeling i den resulterende punktskyen. Følgende filterinnstillinger kan konfigureres.
| Parameter | Hva den gjør |
| ---------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| High Threshold | Kontrollerer hvor lempelig stereomatching-algoritmen er. Lavere er mer lempelig, høyere er mer nøyaktig. |
| Feature Count | Maksimalt tillatt antall særtrekk i én enkelt bilderamme. Høyere antall særtrekk øker sjansen for at sløyfelukkinger/kartsammenslåinger skjer, på bekostning av ytelse. |
| Initial FAST Threshold | Innledende FAST-terskel brukt for særtrekksdeteksjon. Lavere terskel øker oppdagede særtrekk, men øker sannsynligheten for feilaktige særtrekksmatcher på tvers av rammer. |
| Min FAST Threshold | Reserve-FAST-terskel som brukes hvis den innledende terskelen ikke fant nok særtrekk. |
## Filterparametere
Et voxel-filter brukes for å sikre jevn punktfordeling i den resulterende punktskyen. Følgende filterinnstillinger kan konfigureres.
 | Parameter | Hva den gjør |
| -------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| Min Points per Voxel | Minimum antall punkter som kreves innenfor en enkelt voxel for å produsere et synlig punkt i utdatapunktskyen |
| Min Depth (m) | Punkter nærmere enn denne terskelen vil bli ignorert. |
| Max Depth (m) | Punkter lenger unna enn denne terskelen vil bli ignorert. |
| Leaf Size (cm) | Størrelse i centimeter på en voxel. Senking av denne verdien øker detaljnivået på bekostning av minneforbruk. Størrelser mindre enn 2 cm bør kun brukes på små kart. |
| Parameter | Hva den gjør |
| -------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| Min Points per Voxel | Minimum antall punkter som kreves innenfor en enkelt voxel for å produsere et synlig punkt i utdatapunktskyen |
| Min Depth (m) | Punkter nærmere enn denne terskelen vil bli ignorert. |
| Max Depth (m) | Punkter lenger unna enn denne terskelen vil bli ignorert. |
| Leaf Size (cm) | Størrelse i centimeter på en voxel. Senking av denne verdien øker detaljnivået på bekostning av minneforbruk. Størrelser mindre enn 2 cm bør kun brukes på små kart. |