> ## Documentation Index
> Fetch the complete documentation index at: https://docs.dwe.ai/llms.txt
> Use this file to discover all available pages before exploring further.
# 추적 및 필터 매개변수
최상의 즉시 사용 경험을 위해서는 기본 매개변수를 그대로 사용하세요. 수동 조정은
전적으로 선택 사항이며 고급 성능 최적화를 위해 마련된 기능입니다.
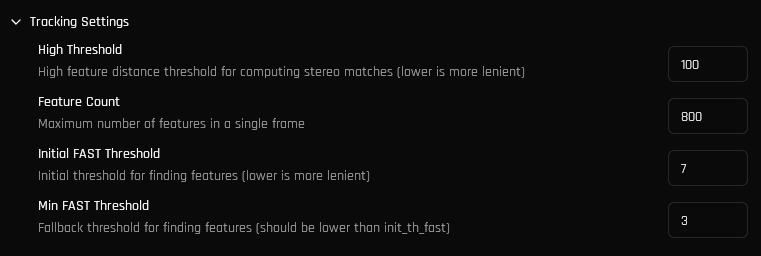
## 추적 매개변수
VSLAM 추적 성능은 다음 매개변수를 조정하여 사용 환경에 최적화할 수 있습니다.
 | 매개변수 | 기능 |
| ---------------------- | --------------------------------------------------------------------------------- |
| High Threshold | 스테레오 매칭 알고리즘의 관대함 정도를 제어합니다. 낮을수록 더 관대하고, 높을수록 더 정확합니다. |
| Feature Count | 단일 프레임에서 허용되는 최대 특징점 수입니다. 특징점 수가 많을수록 루프 클로저/맵 병합이 일어날 가능성이 높아지지만 성능이 저하됩니다. |
| Initial FAST Threshold | 특징 검출에 사용되는 초기 FAST 임계값입니다. 임계값이 낮을수록 검출되는 특징이 많아지지만, 프레임 간 잘못된 특징 매칭 가능성도 증가합니다. |
| Min FAST Threshold | 초기 임계값으로 충분한 특징을 찾지 못한 경우 사용되는 대체 FAST 임계값입니다. |
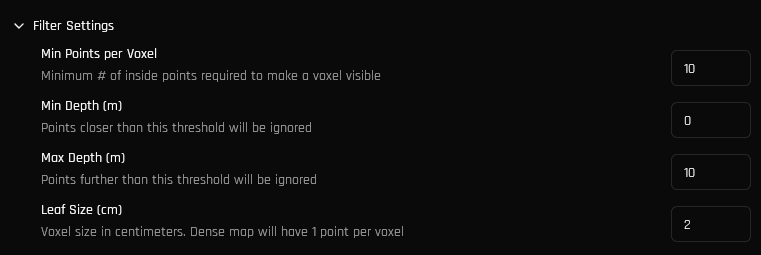
## 필터 매개변수
결과 포인트 클라우드에서 균일한 포인트 분포를 보장하기 위해 voxel 필터가 사용됩니다. 다음 필터 설정을 구성할 수 있습니다.
| 매개변수 | 기능 |
| ---------------------- | --------------------------------------------------------------------------------- |
| High Threshold | 스테레오 매칭 알고리즘의 관대함 정도를 제어합니다. 낮을수록 더 관대하고, 높을수록 더 정확합니다. |
| Feature Count | 단일 프레임에서 허용되는 최대 특징점 수입니다. 특징점 수가 많을수록 루프 클로저/맵 병합이 일어날 가능성이 높아지지만 성능이 저하됩니다. |
| Initial FAST Threshold | 특징 검출에 사용되는 초기 FAST 임계값입니다. 임계값이 낮을수록 검출되는 특징이 많아지지만, 프레임 간 잘못된 특징 매칭 가능성도 증가합니다. |
| Min FAST Threshold | 초기 임계값으로 충분한 특징을 찾지 못한 경우 사용되는 대체 FAST 임계값입니다. |
## 필터 매개변수
결과 포인트 클라우드에서 균일한 포인트 분포를 보장하기 위해 voxel 필터가 사용됩니다. 다음 필터 설정을 구성할 수 있습니다.
 | 매개변수 | 기능 |
| -------------------- | ----------------------------------------------------------------------------------------- |
| Min Points per Voxel | 출력 클라우드에서 보이는 포인트를 생성하기 위해 단일 voxel 내에 필요한 최소 포인트 수입니다. |
| Min Depth (m) | 이 임계값보다 가까운 포인트는 무시됩니다. |
| Max Depth (m) | 이 임계값보다 먼 포인트는 무시됩니다. |
| Leaf Size (cm) | voxel의 크기(센티미터 단위)입니다. 이 값을 낮추면 메모리 소비가 증가하는 대신 디테일이 향상됩니다. 2cm 미만의 크기는 작은 맵에서만 사용해야 합니다. |
| 매개변수 | 기능 |
| -------------------- | ----------------------------------------------------------------------------------------- |
| Min Points per Voxel | 출력 클라우드에서 보이는 포인트를 생성하기 위해 단일 voxel 내에 필요한 최소 포인트 수입니다. |
| Min Depth (m) | 이 임계값보다 가까운 포인트는 무시됩니다. |
| Max Depth (m) | 이 임계값보다 먼 포인트는 무시됩니다. |
| Leaf Size (cm) | voxel의 크기(센티미터 단위)입니다. 이 값을 낮추면 메모리 소비가 증가하는 대신 디테일이 향상됩니다. 2cm 미만의 크기는 작은 맵에서만 사용해야 합니다. |