> ## Documentation Index
> Fetch the complete documentation index at: https://docs.dwe.ai/llms.txt
> Use this file to discover all available pages before exploring further.
# Coverage Mapping (VSLAM)
## 概要
**VSLAM はベータ版製品です。** 現在も改良とテストを積極的に進めているため、
不具合、パフォーマンスの低下、想定外の動作が発生する可能性があります。
バグ報告や機能リクエストは [support@dwe.ai](mailto:support@dwe.ai) までお寄せください。
DeepWater Desktop は環境の高密度な再構築を自動的に生成でき、リアルタイムのカバレッジマッピングや計測に活用できます。
## 必要条件
* SVC Pro モジュール - dweOS Pro を実行
* トップサイドコンピュータ/ノート PC - DeepWater Desktop を実行
## 起動パラメータ
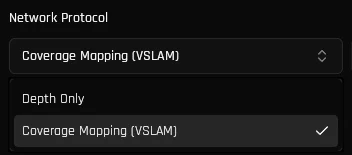
「Add Stream」ダイアログを開き、カメラを選択して Network Protocol を Coverage Mapping に切り替えます。手順については [クイックスタートガイド](/ja/dw-desktop/quickstart) を参照してください。
 最良の使用感を得るためには、デフォルトのパラメータのまま使用することを推奨します。手動チューニングは完全に任意で、
高度なパフォーマンス最適化のためのものです。
VSLAM のトラッキング性能は、トラッキングおよびボクセルフィルターのパラメータを調整することで、ご利用の環境に合わせて最適化できます。
VSLAM のトラッキングおよびボクセルフィルターのパラメータをチューニングするためのリファレンスです。
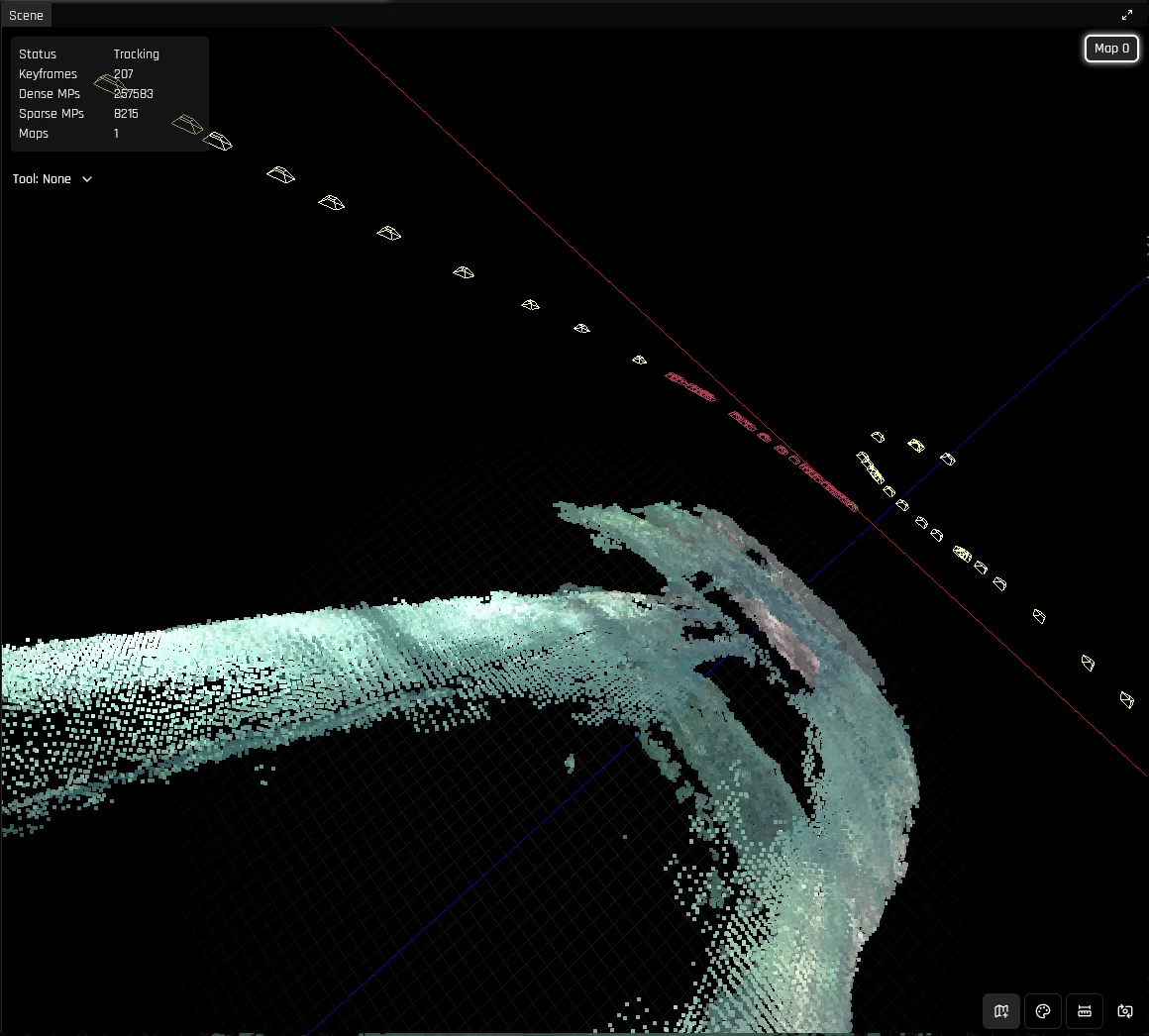
「Start Stream」ボタンを押します。ストリームが開始されると、DeepWater Desktop はデータの処理を開始します。
カメラを動かすにつれて 3D ポイントクラウドが生成されていく様子が表示されます。
データを後処理する予定がある場合は、ここで録画も開始してください。
## ループクロージャ
すべての SLAM システムは時間とともに誤差を蓄積します。これを補正するため、ループクロージャという概念を使用します。これは、異なる時刻に同じ姿勢で同じ場所を再観測することを指します。
DeepWater Desktop はループクロージャを自動的に認識し、以前に測定された姿勢とポイントクラウドを適切に補正します。
ループクロージャを発生させるには、以前の姿勢に戻って同じ方向を向くだけで済みます。画面右下にメッセージがポップアップ表示されます:
最良の使用感を得るためには、デフォルトのパラメータのまま使用することを推奨します。手動チューニングは完全に任意で、
高度なパフォーマンス最適化のためのものです。
VSLAM のトラッキング性能は、トラッキングおよびボクセルフィルターのパラメータを調整することで、ご利用の環境に合わせて最適化できます。
VSLAM のトラッキングおよびボクセルフィルターのパラメータをチューニングするためのリファレンスです。
「Start Stream」ボタンを押します。ストリームが開始されると、DeepWater Desktop はデータの処理を開始します。
カメラを動かすにつれて 3D ポイントクラウドが生成されていく様子が表示されます。
データを後処理する予定がある場合は、ここで録画も開始してください。
## ループクロージャ
すべての SLAM システムは時間とともに誤差を蓄積します。これを補正するため、ループクロージャという概念を使用します。これは、異なる時刻に同じ姿勢で同じ場所を再観測することを指します。
DeepWater Desktop はループクロージャを自動的に認識し、以前に測定された姿勢とポイントクラウドを適切に補正します。
ループクロージャを発生させるには、以前の姿勢に戻って同じ方向を向くだけで済みます。画面右下にメッセージがポップアップ表示されます:
 これによりループクロージャが発生したことが示され、続いてポイントクラウドと過去の姿勢のグローバル調整が行われます。
これによりループクロージャが発生したことが示され、続いてポイントクラウドと過去の姿勢のグローバル調整が行われます。
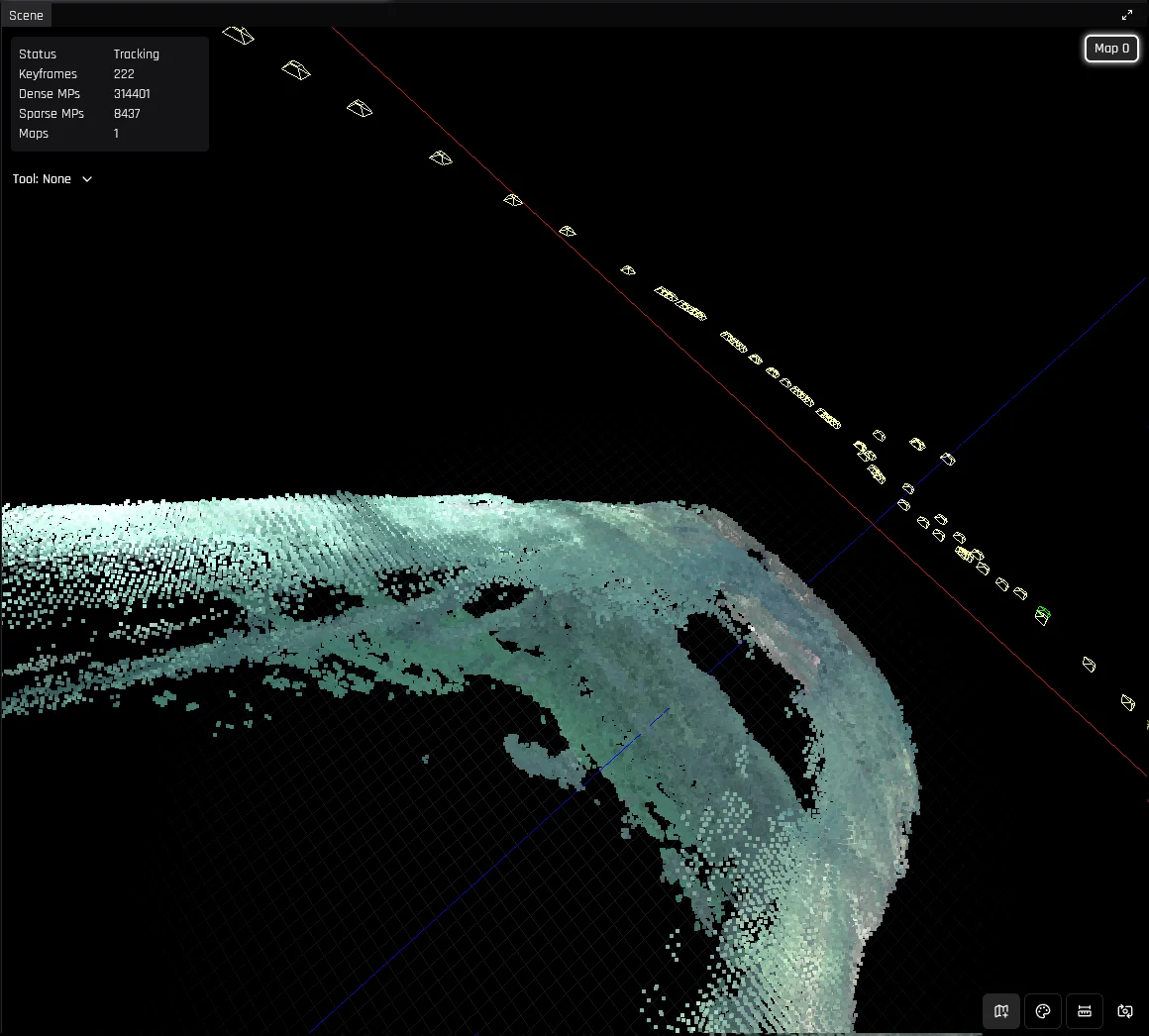 ## マップ
トラッキングが長時間失われると、システムは新しいマップを最初から作成します。これまでのマップはすべてメモリに保存されており、右上のラベルをクリックすることで表示できます:
## マップ
トラッキングが長時間失われると、システムは新しいマップを最初から作成します。これまでのマップはすべてメモリに保存されており、右上のラベルをクリックすることで表示できます:
 短時間のトラッキングロスは気にする必要はありません。マップは可能な場合、自動的にマージされます。重複する部分が検出されると、次のメッセージが表示されます:
短時間のトラッキングロスは気にする必要はありません。マップは可能な場合、自動的にマージされます。重複する部分が検出されると、次のメッセージが表示されます:
 しばらくするとポイントクラウドに変更が反映されます。
自動マップ作成は Z キーまたは Map ボタンでオン/オフを切り替えられます。オフの場合、システムは既存のマップに対して自己位置推定のみを試みます。
しばらくするとポイントクラウドに変更が反映されます。
自動マップ作成は Z キーまたは Map ボタンでオン/オフを切り替えられます。オフの場合、システムは既存のマップに対して自己位置推定のみを試みます。
 ## ツールとコントロール
### ナビゲーション
Scene ビューにフォーカスがある状態で、以下のコントロールを使って仮想カメラを移動できます:
| コントロール | アクション |
| ------------------------------------------------------ | -------- |
| W / S | 前進 / 後退 |
| A / D | 左 / 右に移動 |
| E / Q | 上 / 下に移動 |
| 右クリック + ドラッグ | ビューをパン |
## ツールとコントロール
### ナビゲーション
Scene ビューにフォーカスがある状態で、以下のコントロールを使って仮想カメラを移動できます:
| コントロール | アクション |
| ------------------------------------------------------ | -------- |
| W / S | 前進 / 後退 |
| A / D | 左 / 右に移動 |
| E / Q | 上 / 下に移動 |
| 右クリック + ドラッグ | ビューをパン |
 ### Ruler
Space キーを押してストリームを一時停止します。
R キーを押すか、右下の Ruler アイコンを選択して Ruler ツールを有効化します。2 点を選択するとその間の距離が表示されます。
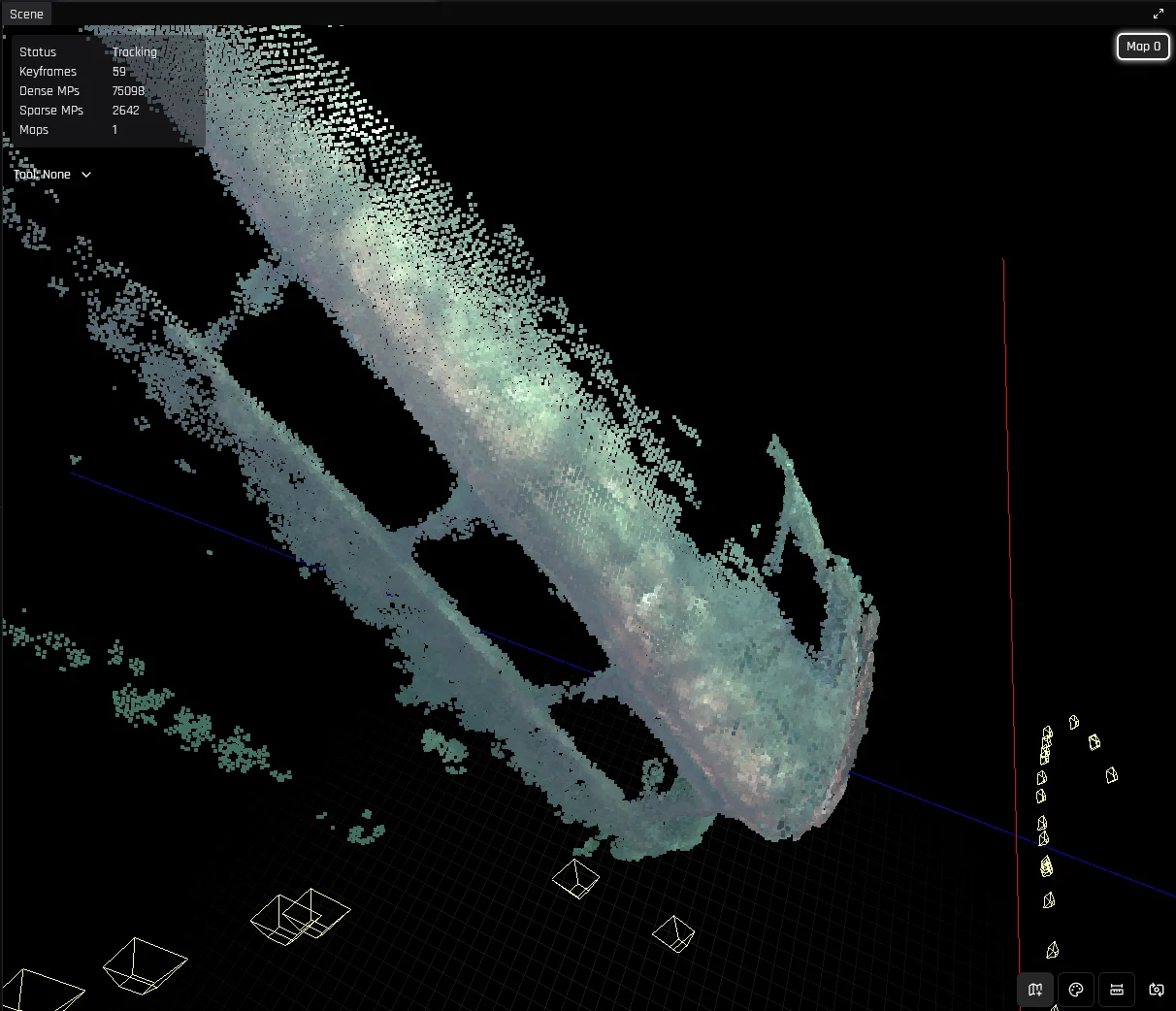
### カラーモード
C キーを押すか、右下のカラーパレットアイコンを選択して、Texture モードと Coverage モードの表示を切り替えます。
### Ruler
Space キーを押してストリームを一時停止します。
R キーを押すか、右下の Ruler アイコンを選択して Ruler ツールを有効化します。2 点を選択するとその間の距離が表示されます。
### カラーモード
C キーを押すか、右下のカラーパレットアイコンを選択して、Texture モードと Coverage モードの表示を切り替えます。
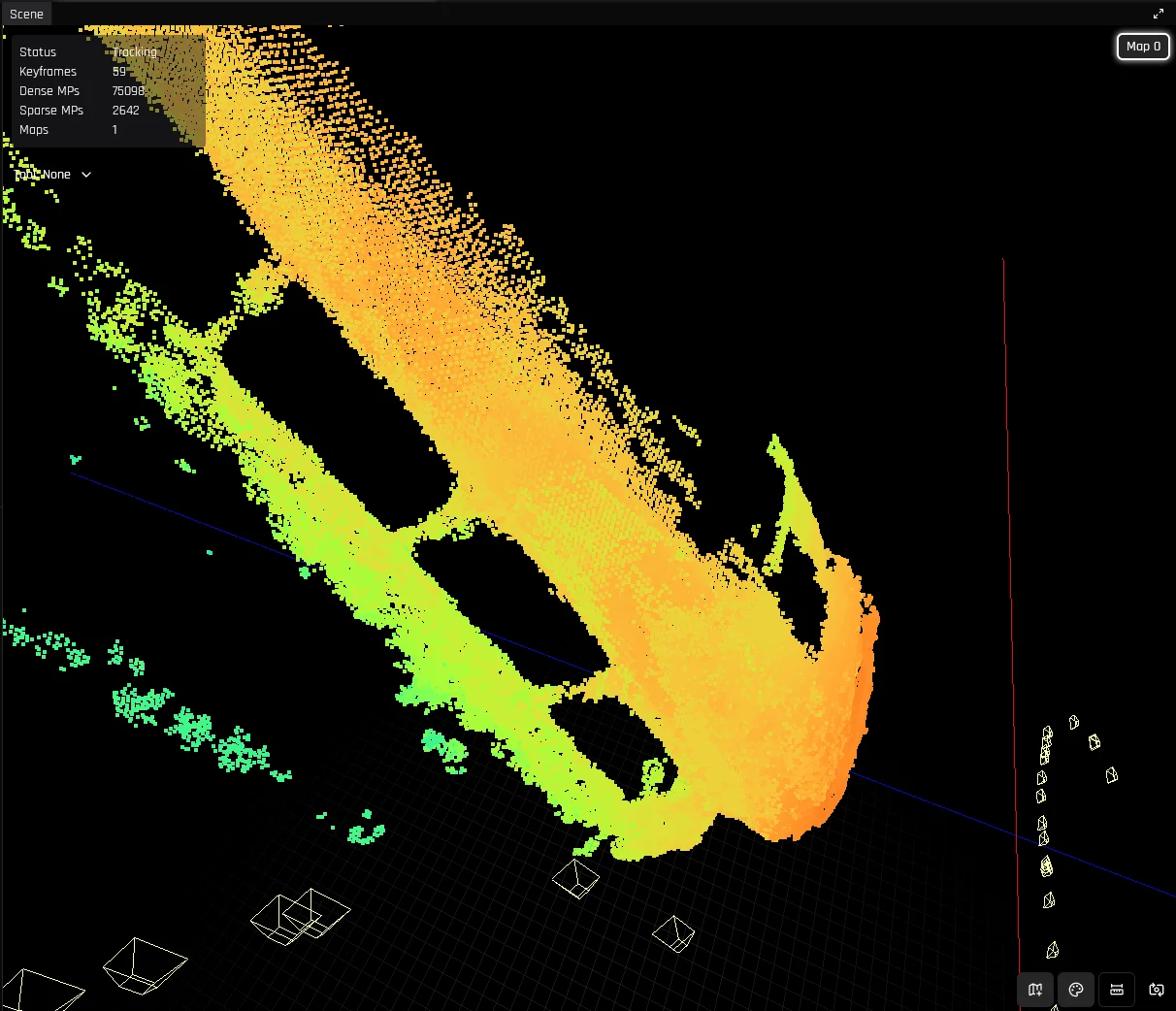 Coverage モードを使用すると、ディテールが不足している箇所を見つけやすくなります。
| 色 | 観測距離 | ディテール |
| --------------------------------------------------------------------------------- | ---- | ------------------------------- |
| Orange Red | 近距離 | 高いディテール |
| Green Blue | 遠距離 | 低めのディテール — より近づいて再スキャンするとよいでしょう |
## トラブルシューティング
### UDP 受信バッファの設定
UDP 受信バッファのサイズが不足していると、RTP パケットが破棄されることがあります。デフォルト値ではフルフレームを適切にキャプチャするには不十分な場合が多いため、手動で値を増やすことを推奨します。
OS の最大受信バッファサイズを 8MB に設定することを推奨します:
```bash theme={null}
sudo sysctl -w net.core.rmem_max=8338608
sudo sysctl -w net.core.rmem_default=8338608
```
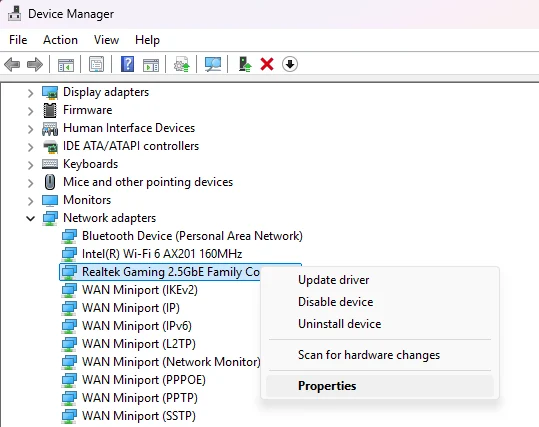
デバイスマネージャーを開き、SVC が接続されているネットワークアダプターを右クリックします。「プロパティ」ページを開きます。
Coverage モードを使用すると、ディテールが不足している箇所を見つけやすくなります。
| 色 | 観測距離 | ディテール |
| --------------------------------------------------------------------------------- | ---- | ------------------------------- |
| Orange Red | 近距離 | 高いディテール |
| Green Blue | 遠距離 | 低めのディテール — より近づいて再スキャンするとよいでしょう |
## トラブルシューティング
### UDP 受信バッファの設定
UDP 受信バッファのサイズが不足していると、RTP パケットが破棄されることがあります。デフォルト値ではフルフレームを適切にキャプチャするには不十分な場合が多いため、手動で値を増やすことを推奨します。
OS の最大受信バッファサイズを 8MB に設定することを推奨します:
```bash theme={null}
sudo sysctl -w net.core.rmem_max=8338608
sudo sysctl -w net.core.rmem_default=8338608
```
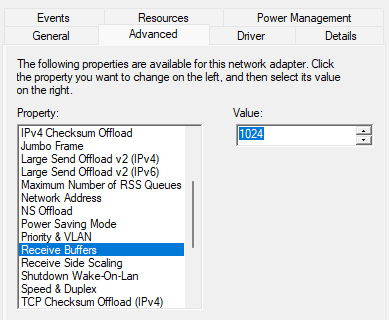
デバイスマネージャーを開き、SVC が接続されているネットワークアダプターを右クリックします。「プロパティ」ページを開きます。
 「詳細設定」タブに移動し、「受信バッファ」を選択します。1024 または許容される最大値に設定してください。
「詳細設定」タブに移動し、「受信バッファ」を選択します。1024 または許容される最大値に設定してください。