> ## Documentation Index
> Fetch the complete documentation index at: https://docs.dwe.ai/llms.txt
> Use this file to discover all available pages before exploring further.
# トラッキング & フィルターパラメータ
最良の使用感を得るためには、デフォルトのパラメータのまま使用することを推奨します。手動チューニングは完全に任意で、
高度なパフォーマンス最適化のためのものです。
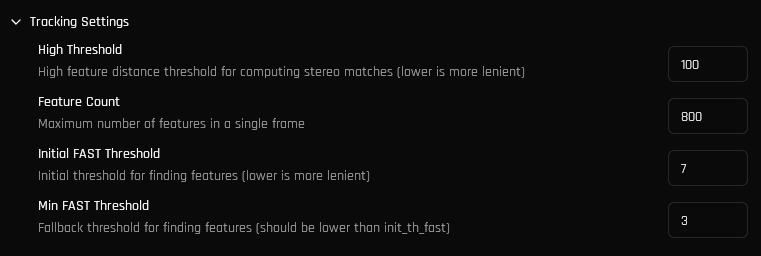
## トラッキングパラメータ
VSLAM のトラッキング性能は、以下のパラメータを調整することで、ご利用の環境に合わせて最適化できます。
 | パラメータ | 説明 |
| ---------------------- | ------------------------------------------------------------------------------ |
| High Threshold | ステレオマッチングアルゴリズムの寛容さを制御します。低くするほど寛容になり、高くするほど精度が上がります。 |
| Feature Count | 1 フレーム内で許容される最大特徴量数。特徴量数を増やすとループクロージャやマップマージが発生しやすくなりますが、パフォーマンスは低下します。 |
| Initial FAST Threshold | 特徴量検出に使用される初期 FAST しきい値。しきい値を下げると検出される特徴量は増えますが、フレーム間で誤った特徴量マッチが発生する可能性も高まります。 |
| Min FAST Threshold | 初期しきい値で十分な特徴量が見つからなかった場合に使用されるフォールバック FAST しきい値。 |
## フィルターパラメータ
ボクセルフィルターは、生成されるポイントクラウド内で点が均一に分布するようにするために使用されます。以下のフィルター設定を構成できます。
| パラメータ | 説明 |
| ---------------------- | ------------------------------------------------------------------------------ |
| High Threshold | ステレオマッチングアルゴリズムの寛容さを制御します。低くするほど寛容になり、高くするほど精度が上がります。 |
| Feature Count | 1 フレーム内で許容される最大特徴量数。特徴量数を増やすとループクロージャやマップマージが発生しやすくなりますが、パフォーマンスは低下します。 |
| Initial FAST Threshold | 特徴量検出に使用される初期 FAST しきい値。しきい値を下げると検出される特徴量は増えますが、フレーム間で誤った特徴量マッチが発生する可能性も高まります。 |
| Min FAST Threshold | 初期しきい値で十分な特徴量が見つからなかった場合に使用されるフォールバック FAST しきい値。 |
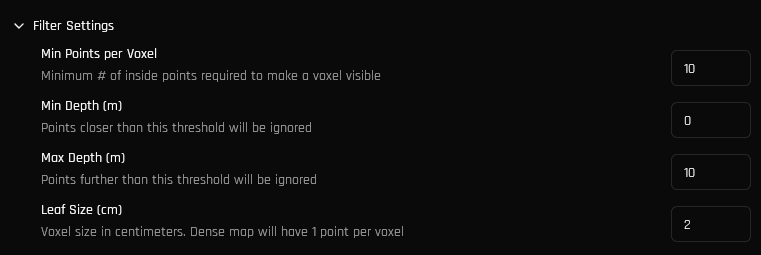
## フィルターパラメータ
ボクセルフィルターは、生成されるポイントクラウド内で点が均一に分布するようにするために使用されます。以下のフィルター設定を構成できます。
 | パラメータ | 説明 |
| -------------------- | -------------------------------------------------------------------------------------- |
| Min Points per Voxel | 出力クラウドで可視化するために、1 つのボクセル内に必要となる最小ポイント数 |
| Min Depth (m) | このしきい値より近いポイントは無視されます。 |
| Max Depth (m) | このしきい値より遠いポイントは無視されます。 |
| Leaf Size (cm) | ボクセル 1 つのサイズ (センチメートル)。値を小さくするとディテールは増えますが、メモリ消費量も増加します。2cm 未満のサイズは小規模なマップでのみ使用してください。 |
| パラメータ | 説明 |
| -------------------- | -------------------------------------------------------------------------------------- |
| Min Points per Voxel | 出力クラウドで可視化するために、1 つのボクセル内に必要となる最小ポイント数 |
| Min Depth (m) | このしきい値より近いポイントは無視されます。 |
| Max Depth (m) | このしきい値より遠いポイントは無視されます。 |
| Leaf Size (cm) | ボクセル 1 つのサイズ (センチメートル)。値を小さくするとディテールは増えますが、メモリ消費量も増加します。2cm 未満のサイズは小規模なマップでのみ使用してください。 |