> ## Documentation Index
> Fetch the complete documentation index at: https://docs.dwe.ai/llms.txt
> Use this file to discover all available pages before exploring further.
# Paramètres de suivi et de filtre
Conservez les paramètres par défaut pour la meilleure expérience prête à l'emploi. Le réglage manuel
est entièrement optionnel et réservé à l'optimisation avancée des performances.
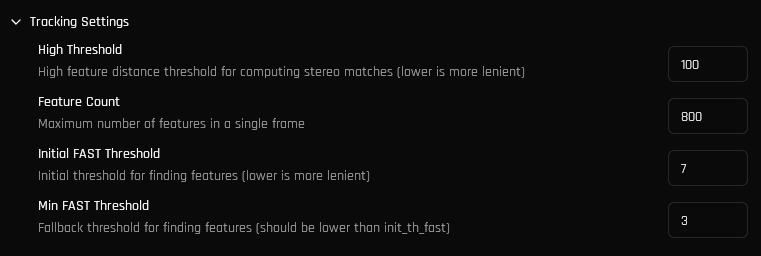
## Paramètres de suivi
Les performances de suivi VSLAM peuvent être optimisées pour votre environnement en ajustant les paramètres suivants.
 | Paramètre | Fonction |
| ---------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| High Threshold | Contrôle la tolérance de l'algorithme de mise en correspondance stéréo. Plus bas est plus tolérant, plus haut est plus précis. |
| Feature Count | Nombre maximal de caractéristiques autorisées dans une seule trame. Un nombre plus élevé augmente la probabilité de fermetures de boucle/fusions de cartes au prix des performances. |
| Initial FAST Threshold | Seuil FAST initial utilisé pour la détection des caractéristiques. Un seuil plus bas augmente le nombre de caractéristiques détectées, mais accroît le risque de correspondances incorrectes entre les trames. |
| Min FAST Threshold | Seuil FAST de repli utilisé si le seuil initial n'a pas trouvé suffisamment de caractéristiques. |
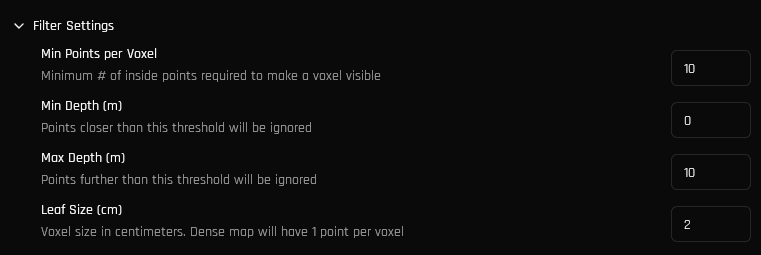
## Paramètres du filtre
Un filtre voxel est utilisé pour assurer une distribution uniforme des points dans le nuage de points résultant. Les paramètres de filtre suivants peuvent être configurés.
| Paramètre | Fonction |
| ---------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| High Threshold | Contrôle la tolérance de l'algorithme de mise en correspondance stéréo. Plus bas est plus tolérant, plus haut est plus précis. |
| Feature Count | Nombre maximal de caractéristiques autorisées dans une seule trame. Un nombre plus élevé augmente la probabilité de fermetures de boucle/fusions de cartes au prix des performances. |
| Initial FAST Threshold | Seuil FAST initial utilisé pour la détection des caractéristiques. Un seuil plus bas augmente le nombre de caractéristiques détectées, mais accroît le risque de correspondances incorrectes entre les trames. |
| Min FAST Threshold | Seuil FAST de repli utilisé si le seuil initial n'a pas trouvé suffisamment de caractéristiques. |
## Paramètres du filtre
Un filtre voxel est utilisé pour assurer une distribution uniforme des points dans le nuage de points résultant. Les paramètres de filtre suivants peuvent être configurés.
 | Paramètre | Fonction |
| -------------------- | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| Min Points per Voxel | Nombre minimal de points requis dans un voxel pour produire un point visible dans le nuage de sortie. |
| Min Depth (m) | Les points plus proches que ce seuil seront ignorés. |
| Max Depth (m) | Les points plus éloignés que ce seuil seront ignorés. |
| Leaf Size (cm) | Taille en centimètres d'un voxel. Réduire cette valeur augmente le niveau de détail au prix de la consommation mémoire. Les tailles inférieures à 2 cm ne doivent être utilisées que sur de petites cartes. |
| Paramètre | Fonction |
| -------------------- | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| Min Points per Voxel | Nombre minimal de points requis dans un voxel pour produire un point visible dans le nuage de sortie. |
| Min Depth (m) | Les points plus proches que ce seuil seront ignorés. |
| Max Depth (m) | Les points plus éloignés que ce seuil seront ignorés. |
| Leaf Size (cm) | Taille en centimètres d'un voxel. Réduire cette valeur augmente le niveau de détail au prix de la consommation mémoire. Les tailles inférieures à 2 cm ne doivent être utilisées que sur de petites cartes. |